Domov Princip činnosti DPT. Stroj musí mít dvě hlavní části: první část vytváří magnetický tok, druhá část, ve které je indukováno emf. První díl v autě DC 

bez hnutí. Lisované póly (2) jsou připevněny k rámu (1), na kterém je umístěno budicí vinutí (3). Druhá část je kotva. Kotva se otáčí. Jedná se o válec vyrobený z plechů elektrooceli (4) Ve vnější části kotvy jsou drážky, kde jsou uloženy sekce vinutí (5). Každá sekce je připojena ke kolektorovým deskám (6). Ke změně frekvence lze použít elektrický obvod zvaný oscilátor. Chcete-li vytvořit jednoduchý obvod oscilátoru, připojte paralelně induktor variabilní kondenzátor
. Toto pole je přitahováno nebo odpuzováno soustavou permanentních magnetů. Jedním ze způsobů regulace napájecího napětí pro motor je použití obvodu děliče napětí. Jednoduché schéma
Ovládání sdílení napětí lze provést pomocí potenciometru. Připojte kladnou napájecí svorku k jedné ze svorek potenciometru. Připojte zápornou napájecí svorku k druhému kabelu potenciometru. Připojte kabel potenciometru k jedné ze svorek motoru a druhý k záporné svorce napájení. V případě potřeby nastavte potenciometr pro ovládání otáček motoru. Elektromagnetický moment závisí na toku a proudu kotvy. V režimu generátoru elektromagnetický točivý moment 
je inhibiční. Bude napsána rovnice pro rovnovážný stav momentů, kde je mechanický moment na hřídeli generátoru, je moment xx, je elektromagnetický moment. Základní pohybová rovnice elektrického pohonu. Ustálený proces, kdy,,, If,,. Li,,. Vývoj obecné elektronické karty pro řízení třífázových motorů. Obecný návrh elektronické desky pro řízení 3-fázového střídavého proudu. Sanchez R. 7. Informace o článku: přijato: únor. Tento článek představuje návrh a vývoj napájecího ovladače s regulátorem za nízkou cenu a s širokou škálou aplikací v průmyslu. Navrhovaný procesor se skládá ze dvou stupňů: první je řídicí stupeň, ve kterém je zahrnut vyhrazený mikrokontrolér pro řízení motoru, a druhý je výkonová reference řízená izolovanými hradlovými tranzistory jako spínacími prvky.
 Princip regulace rychlosti. Z hlediska regulace otáček je stejnosměrný motor univerzální. Otáčky lze upravit změnou odporu v obvodu kotvy, toku a přiváděného napětí. To lze vidět ze vzorce: .
Princip regulace rychlosti. Z hlediska regulace otáček je stejnosměrný motor univerzální. Otáčky lze upravit změnou odporu v obvodu kotvy, toku a přiváděného napětí. To lze vidět ze vzorce: .
Tento návrh je součástí projektu, jehož hlavním cílem je navrhnout metodiku přispívající ke zlepšení kvality elektronických prototypů, které jsou vyvíjeny v akademickém prostředí; tak, aby více odpovídaly standardům požadovaným průmyslem, což usnadňuje komunikaci mezi univerzitou a průmyslem v rámci technologické spolupráce v oblasti automatizace a řízení.
Deskriptory: energetický manažer, metodika, kvalita, prototypy, průmyslové standardy, indukční motor. Prvním stupněm řízení, který zahrnuje regulátor asynchronního motoru, je specifický mikrokontrolér. Tento projekt je součástí širšího projektu, jehož hlavním cílem je zkvalitnění akademie.
Odpor v obvodu kotvy. Proudové rovnice před a po zavedení odporu
Odkud, tj. moment proudu klesá (). Zároveň se snižuje rychlost. S klesající rychlostí se zvyšuje proud kotvy a dosáhne původního proudu kotvy, ale při nižší rychlosti. Rychlost otáčení je řízena odporem v obvodu kotvy ve směru klesající rychlosti. 
Očekává se, že tyto prototypy budou v souladu s průmyslovými standardy, což umožní propojení průmyslu a univerzit ohledně technologické spolupráce v oblasti automatizace a řízení. Klíčová slova: energetický manažer, metodika, kvalita, prototypy, průmyslové standardy, indukce motoru.
Propojení univerzit a výzkumných center s výrobním sektorem je téma, které je v Mexiku přítomno již více než deset let v plánech a programech hospodářského a sociálního rozvoje navrhovaných různými federálními a státními vládami. Účelem tohoto spojení je začlenit a aplikovat technologické vědecké poznatky v průmyslové výrobě tak, aby se stala ústřední osou konkurenceschopnosti podniků.
Tok. Proud kotvy před a po změně toku je jejich poměr. Rovnice 5.1. momenty Snižme průtok, proud kotvy se zvýšil, pak se (zvyšuje).
Napětí. Rychlost otáčení je řízena následujícími způsoby: A) Systém generátor-motor (G-D). B) Tyristorový měnič-motor (TP-D). B) Regulace šířky pulzu.
V současnosti však mají latinskoamerické univerzity omezenou kapacitu pro přenos technologického rozvoje do průmyslu. Některými z těchto omezení jsou nedostatečná výzkumná schopnost navrhovat technologická řešení problémů výrobních podniků a neznalost požadavků na kvalitu, které technologický vývoj musí splňovat, aby se stal konkurenceschopným na průmyslové úrovni.
Na akademické úrovni existuje několik výzkumných a vývojových projektů týkajících se třífázových elektromotorů. V projektech vyvinutých latinskoamerickými univerzitami se často volí komerční řídicí jednotky, jako jsou programovatelné logické řídicí jednotky, protože jsou široce známé a spolehlivé. Toto řešení však není praktické pro implementaci v aplikacích, kde je cílem hromadná výroba s nízkými náklady.
 A) Systém G-D, obr. 234. . Zvyšováním budícího proudu generátoru i vg se zvyšuje průtok F g a E g, a proto se zvyšuje napětí na kotvě motoru a zvyšují se otáčky.
A) Systém G-D, obr. 234. . Zvyšováním budícího proudu generátoru i vg se zvyšuje průtok F g a E g, a proto se zvyšuje napětí na kotvě motoru a zvyšují se otáčky.

V porovnání s tím, přehled stavu techniky našel malý počet úspěšných nástrojů v návrzích akademického původu. V jednom z nich je notoricky známé použití komerčního ovladače, který stojí 5krát více než použitý motor.
Na práci Tsu a Hsu by byla zajímavá analýza nákladů, která by dokázala, že toto řešení je životaschopnou možností pro sériovou výrobu. Tato práce vznikla na základě požadavku výrobní společnosti na vývoj prototypu zařízení pro řízení výkonu s regulátorem pro třífázový motor. Bylo považováno za vhodné použít metodiky, které zajistí splnění požadavků klienta.
B) Tyristorový měnič-motor. Zvětšením řídicího úhlu se plocha půlcyklu zmenšuje, průměrná hodnota napětí -U av klesá, a proto se snižuje rychlost otáčení.
B) Regulace šířky pulzu.
Změnou doby pulsu t se mění pracovní cyklus, kde t a je doba pulsu; t p - doba pauzy. Průměrná hodnota U av =U 0 . . 
Použitá metodika je založena na konceptualizaci procesu návrhu a konstrukce elektronického prototypu podle schématu koordinované interakce mezi regulátorem a řízeným subsystémem. Zákazník potřebuje ve své aplikaci ovládat třífázový motor. Tento typ motoru vyžaduje malou údržbu, navíc k požadavku trhu, který vyžaduje stále více zařízení s lepším výkonem.
Řízení třífázových motorů v kombinaci s klientskou aplikací vyžaduje složité řídicí algoritmy implementované prostřednictvím mikrokontroléru, který umožňuje zpracování signálu v reálném čase. Provozní podmínky karty: teplota prostředí a teplo generované součástmi.
6.Metody regulace činného a jalového výkonu synchronního stroje.
Metody regulace činného a jalového výkonu synchronního generátoru. Jak jsme právě viděli, pokud změníme buzení generátoru, změníme tím jalový výkon, buď dodáváme, nebo spotřebujeme. Aktivní výkon lze upravit pouze změnou mechanická síla ze strany parní turbíny nebo hydraulické turbíny. S rostoucím výkonem činný výkon, je nutné zvýšit mechanický výkon na straně turbíny.
Snadná oprava a údržba, tato úvaha přímo ovlivňuje hustotu obvodu a umístění součástí. Otestujte požadavky, které mohou ovlivnit umístění součástí, směrování trasování a přiřazení konektorů. Některé úvahy, jak se vyhnout elektromagnetickému rušení.
Existuje několik velmi jednoduchých úvah, jak snížit čas a náklady na hledání závad. Například orientace polarizovaných dílů nebo komponent musí být konzistentní, aby konstruktér nezaměnil komponenty orientované o 180° mimo fázi s jinými. Nepolarizované součásti musí mít vývod č. 1 plně identifikovaný, aby operátor provádějící testy měl odkaz na konkrétní kolík, který je třeba testovat.
Spusťte SD. Pro spuštění synchronního motoru je nutné zrychlit jeho rotor pomocí vnějšího krouticího momentu na rychlost otáčení blízkou synchronní. Kvůli chybějícímu rozběhovému momentu u synchronního motoru se k jeho rozběhu používají následující metody: 1 Startování pomocí pomocného motoru; 2Asynchronní start motoru.
1. Spouštění synchronního motoru pomocí pomocného motoru lze provést pouze bez mechanického zatížení jeho hřídele, tzn. téměř prázdné. V tomto případě se motor během doby rozběhu dočasně změní na synchronní generátor, jehož rotor je poháněn do rotace malým pomocným motorkem až do n=0,95n 1 . Stator tohoto generátoru je zapojen paralelně do sítě při dodržení podmínek tohoto zapojení. Po připojení statoru k síti se s krátkým zpožděním zapne budicí vinutí a motor se stáhne do synchronismu a motor pomocného pohonu se mechanicky vypne. Tento způsob spouštění je složitý a má také pomocný motor.
Proto byla pro tento prototyp z logického a schematického přístupu navržena integrace dvou stupňů, řídicích stupňů, jejichž hlavním úkolem je poskytnout základ pro provádění algoritmů řízení otáček motoru a točivého momentu, a výkonového stupně, jehož hlavním úkolem je stav signálů, které budou přiváděny přímo do motoru v souladu s použitým řídicím algoritmem. Kromě toho, s ohledem na požadavky na velikost karty a na provozní prostředí, snadnost údržby a opravy a výrobní náklady, byl zvažován návrh dvouvrstvého prototypu.
2. Synchronní motor se při rozběhu změní na asynchronní. Aby bylo možné vytvořit asynchronní rozběhový moment, je ve štěrbinách pólových nástavců motoru s vyčnívajícími póly umístěno zkratované spouštěcí vinutí. Proces spouštění synchronního motoru se provádí ve dvou fázích. Když je statorové vinutí (1) připojeno k síti, v motoru se vytvoří točivé pole, které vyvolá EMF ve zkratovaném vinutí rotoru (2). Pod vlivem jakého proudu poteče v tyčích. V důsledku interakce točivého magnetického pole s proudem ve vinutí nakrátko vzniká točivý moment jako u asynchronního motoru. Vlivem tohoto momentu se rotor zrychlí do skluzu blízkého nule (S = 0,05), Obr. 313. Tím končí první fáze. Aby se rotor motoru stáhl do synchronismu, je nutné v něm vytvořit magnetické pole zapnutím stejnosměrného proudu ve budicím vinutí (3) (přepnutím klíče K do polohy 1). Protože rotor je zrychlován na rychlost blízkou synchronní, relativní rychlost statorových a rotorových polí je malá. Tyče se budou hladce překrývat. A po sérii skluzů se opačné póly přitahují a rotor se stáhne do synchronismu. Poté se rotor bude otáčet synchronní rychlostí a jeho rychlost otáčení bude konstantní, obr. 313. Tím končí druhá fáze startu. SD provoz v podbuzeném a přebuzeném režimu (ib=
var).
Provozní režim odpovídá konstantnímu momentu. na. U podbuzeného synchronního motoru odpovídá složka napětí -E 0 proudu I, který zaostává za napětím Uc o úhel φ. Jalová složka proudu I L se bude zpožďovat o 90 0 od vektoru napětí Uc, tzn. tento proud je čistě indukční. To znamená, že při podbuzení bude motor spotřebovávat indukční proud ze sítě, a tedy i jalový výkon ze sítě. 
Obrázek 1 ukazuje blokové schéma handleru. Pěkné schéma Zem poskytuje návrat stejnosměrného napájení a také referenční rovinu pro vysokorychlostní signály střídavého proudu. Na druhé straně je impedanční smyčka oddělovacího kondenzátoru minimalizována, aby byly jeho konektory co nejmenší a byly umístěny v řetězci ve správném pořadí, v blízkosti sítě, která nás zajímá.
Na druhou stranu se doporučuje, aby přiřazení signálu ke svorkám zařízení souviselo se signálem země. Nebyl implementován žádný typ izolace, protože jejich zahrnutí by zvýšilo náklady na sériovou výrobu prototypu. V požadavcích zákazníka je uvedeno, že není nutné znát směr otáčení, ale pouze zajistit, aby byl tento změněn a že koncová aplikace využívá Hallův jev ke zjištění rychlosti otáčení motoru.
S rostoucím buzením bude narůstat hodnota –E 0 1 a proud I bude klesat na Ia = I 1 a bude minimální. V tomto režimu bude SD pracovat s cosφ=1 a jalový výkon, nebudou spotřebovány ani odeslány do sítě. S dalším zvýšením budícího proudu bude složka napětí rovna –E 0 11 a proud I 11 posune vektor napětí sítě o úhel φ 1. Tento režim odpovídá režimu přebuzení. Jalová složka proudu bude kapacitní (vede vektor Uc o 90 0). Tento režim bude odpovídat uvolnění jalového výkonu do sítě. Tento režim je podobný připojení statických nádrží k síti. 

Napájecí napětí pro řídicí a výkonové stupně byla udržována konstantní a v požadovaných provozních rozsazích. Jsou zobrazeny signály 3fázového nezatíženého motoru, kde jsou vidět 2 fáze. Byl získán prototyp hlavního napájecího budiče s regulátorem pro třífázový motor. Prováděné testy byly zaměřeny především na testování signálů výkonového a řídicího stupně ve vztahu k napájecím zdrojům a adaptaci signálu zpětná vazba, poskytnout spolehlivou mapu, která může sloužit jako základ pro testování složitějších algoritmů řízení indukčních motorů, čímž se eliminuje nejistota možných poruch způsobených špatným elektronickým designem.
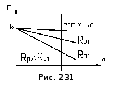
Vidíme tedy, že pokud změníme budicí proud iB, tak se velikost statorového proudu I změní ve velikosti a fázi, tzn. cosφ lze upravit. Tato cenná vlastnost určuje použití synchronních motorů. Závislosti proudu statoru I na budícím proudu iв, I=f(iв) nazýváme charakteristiky tvaru U, Obr. 309. P2 > P1. Charakteristiky jsou brány jako P=konst. Provozní režim odpovídající budícímu proudu od 0 do tečkované čáry je podbuzen a za tečkovanou čárou je přebuzen s uvolněním jalové energie do sítě.
Relevantnost výsledného prototypu spočívá ve skutečnosti, že jeho design a konstrukce byly provedeny aplikací průmyslového standardu pro pokročilé použití, který umožní budoucí práce aplikovat techniky zajištění kvality, vývoj a implementaci testovacího plánu a ověřování, které také odhalí skryté chyby v návrhu, provozu a opomenutí při plnění požadavků klienta a implementuje návrhy na zlepšení výkonu a nákladů navrhované karty.
Použití norem umožňuje vypracování plánu zkoušek a ověřování a související dokumentace v pozdější fázi vývoje prototypů vyvinutých v akademickém prostředí. Výše uvedené je důležité nejen proto, že to usnadňuje přenos této technologie minimalizací nejistoty v komunikaci mezi uživateli a dodavateli, ale také proto, že umožňuje definovat úrovně bezpečnosti, účinnosti a opakovatelnosti prototypu v měřitelných termínech.
V elektroinstalacích jsou pozice, kde se bez elektromotoru na stejnosměrný proud neobejdete. Právě tento elektromotor lze nastavit podle rychlosti otáčení rotoru, což je vyžadováno v elektroinstalacích. Je pravda, že má spoustu nevýhod a jednou z nich je rychlé opotřebení kartáčů, pokud byly instalovány s ohybem, a jejich životnost je poměrně krátká. Při opotřebení dochází k jiskření, takže takový motor nelze použít ve výbušném a prašném prostředí. Navíc stejnosměrný elektromotor je drahý. Ke změně této situace se používá asynchronní motor a frekvenční regulátor pro asynchronní motor.
Kromě zvýšení důvěry uživatelů v prototypy poskytované akademickým sektorem, použití formální metodologie vybavuje studenty inženýrství dovednostmi a schopnostmi potřebnými k řízení technologických inovací.
Modelování a sestava prototypu pro řízení a navigaci mobilních loupeží, in: Electrical and Electronic Engineering Conference. Technologický institut Kostariky, škola elektronického inženýrství. Moderní ovládání aplikované na otáčení elektrické stroje A automatizované systémy. Vývoj a konstrukce automatizovaného didaktického modulu pro spouštění a reverzaci řízení třífázového asynchronního motoru a jednofázového systému výroby elektrické energie.
Téměř ve všech ohledech jsou elektromotory pracující na střídavý proud lepší než jejich stejnosměrné protějšky. Za prvé, jsou spolehlivější. Za druhé mají menší rozměry a hmotnost. Za třetí, cena je nižší. Za čtvrté se snadněji obsluhují a připojují.
Ale mají jednu nevýhodu - obtížnost regulace rychlosti otáčení. V tomto případě standardní metody regulace frekvence asynchronní motory zde nebude vhodné, jmenovitě změna napětí, nastavení odporu a tak dále. Řízení frekvence asynchronní elektrický motor– byl problém číslo jedna. I když teoretický základ je znám už od třicátých let minulého století. Všechno to přišlo na cenu frekvenční měnič. Všechno se změnilo, když byly vynalezeny mikroobvody, s jejichž pomocí bylo možné sestavit frekvenční měnič přes tranzistory s minimálními náklady.
Princip regulace
Způsob regulace rychlosti otáčení asynchronního motoru je tedy založen na jednom vzorci. Tady je dole.
ω=2πf/p, kde
- ω – úhlová rychlost otáčení statoru;
- f – frekvence vstupního napětí;
- p – počet pólových párů.

To znamená, že se ukazuje, že můžete změnit rychlost otáčení elektromotoru pouze změnou frekvence napětí. Co to v praxi znamená? Prvním je hladký chod motoru, což se projeví zejména při spouštění zařízení, kdy samotný motor pracuje pod nejvyšším zatížením. Druhým je zvýšený skluz. Díky tomu se zvyšuje účinnost a snižují se ztráty výkonu.
Struktura frekvenčního regulátoru
Všechny moderní frekvenční měniče jsou postaveny na principu tzv. dvojité konverze. to znamená, AC převeden na stejnosměrný proud přes nekontrolovaný usměrňovač a filtr. Dále přes pulzní střídač (je třífázový) dochází ke zpětné přeměně stejnosměrného proudu na střídavý. Samotný měnič se skládá ze šesti výkonových spínačů (tranzistorů). Každé vinutí elektromotoru je tedy připojeno k určitým spínačům usměrňovače (kladnému nebo zápornému). Je to invertor, který mění frekvenci napětí, které je přiváděno na vinutí statoru. Ve skutečnosti dochází k regulaci frekvence elektromotoru.

V tomto zařízení jsou na výstupu instalovány výkonové tranzistory. Fungují jako klíče. Porovnáme-li je s tyristory, je třeba poznamenat, že první produkují signál ve formě sinusoidy. Právě tento tvar vytváří minimální zkreslení.
Nyní samotný princip činnosti frekvenčního měniče. Abyste tomu porozuměli, doporučujeme podívat se na obrázek níže.
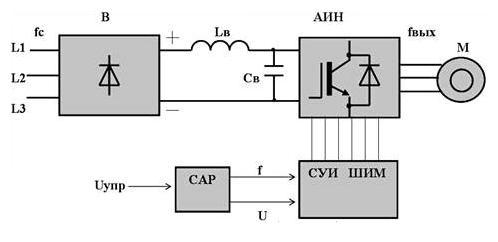
Pojďme si tedy projít obrázek, kde
- „B“ je neřízený usměrňovač výkonu diodového typu.
- "AIN" je autonomní střídač.
- „SUI PWM“ je systém řízení šířky pulzu.
- "SAR" je automatický řídicí systém.
- "Св" - filtrační kondenzátor.
- "Lв" - plyn.
Z diagramu je jasně patrné, že střídač reguluje frekvenci napětí pomocí pulzně šířkového řídicího systému (je vysokofrekvenční). Právě tato část regulátoru je zodpovědná za připojení statorových vinutí elektromotoru střídavě ke kladnému pólu usměrňovače, poté k zápornému pólu. Frekvence připojení k pólům sleduje sinusovou křivku. V tomto případě je frekvence pulzů určena přesně frekvencí PWM. Tak dochází k regulaci frekvence.