Elektromos motor egy olyan mechanizmus, amely az elektromos energiát mechanikai energiává alakítja. Bármely villanymotor működési elve a törvényen alapul elektromágneses indukció. Az elektromos motor jellemzően egy álló részből (állórész) és egy forgórészből (vagy armatúrából) áll, amelyekben álló vagy forgó mágneses mezők jönnek létre. Az elektromos motorok sokféle típusban és változatban kaphatók, széles körben használják az emberi tevékenység számos ágában, és a legkülönbözőbb célokra szolgáló mechanizmusok és hajtások egyik fő alkotóelemét jelentik. A termelés hatékonysága közvetlenül függ az elektromos motor jellemzőitől.
Az elektromos motorok osztályozása
A fő részei, amelyekből áll Elektromos motorok , az állórész és a forgórész. A forgórész a motor forgó része, az állórész pedig az a része, amely álló helyzetben marad. Az elektromos motor működési elve egy forgó kölcsönhatásban rejlik mágneses mező, amelyet az állórész tekercselése és a zárt forgórész tekercsében lévő elektromos áram hoz létre. Ez a folyamat elindítja a forgórész forgását a mező irányába.
Az elektromos motorok fő típusai:
- Motor AC;
- Motor DC;
- Többfázisú motor;
- Egyfázisú motor;
- Szelep motor;
- Léptetőmotor;
- Univerzális kommutátoros motor.
Ha olyan villanymotorokról beszélünk, mint pl aszinkron villanymotorok, akkor az AC motorok típusába tartoznak. Az ilyen motorok olyanok egyfázisú villanymotorok , két- és háromfázisú. Az aszinkron villanymotoroknál a váltakozó áram frekvenciája a tekercsben nem esik egybe a forgórész fordulatszámával. Az aszinkron villanymotor működési folyamatát az állórész és a forgórész mágneses mezőinek generálási idejének különbsége biztosítja. Emiatt a forgórész forgása késik az állórész mezőjéhez képest. Vegyél egy villanymotort aszinkron típus lehetséges olyan gépeknél, amelyek nem igényelnek különleges működési feltételeket az indítószerkezethez.
Az elektromos motorok típusai a külső környezettől való védelem mértéke szerint:
- Robbanásbiztos;
- Védett;
- Zárt.
Robbanásbiztos villanymotorok strapabíró burkolattal kell rendelkeznie, amely a motorok felrobbanása esetén megakadályozza a mechanizmus összes többi alkatrészének károsodását és megakadályozza a tüzet.
Védett motorok Működés közben speciális szárnyakkal és hálókkal vannak lezárva, amelyek megvédik a mechanizmust az idegen tárgyak behatolásától. Olyan környezetben használják, ahol nincs magas páratartalom levegő és gázszennyeződések, por, füst és vegyszerek.
Zárt villanymotorok speciális burkolattal rendelkezik, amely megakadályozza a por, gázok, nedvesség és egyéb anyagok és elemek behatolását, amelyek károsíthatják a motor mechanizmusát. Az ilyen villanymotorok lehetnek tömítettek vagy nem tömítettek.
Alkalmazási kör frekvenciaváltók elég kiterjedt. Ipari mechanizmusok, szállítószalagok, rendszerek szerszámgépeiben és elektromos hajtásaiban keresnek elszívó szellőzésés így tovább. A frekvenciagenerátor működési elve a tengely forgási szögsebességének kiszámításának szabálya, amely olyan tényezőt tartalmaz, mint az ellátó hálózat frekvenciája. Így a villanymotor tekercselés teljesítményfrekvenciájának változtatásával egyenes arányban lehet szabályozni a motor forgórészének forgási sebességét, ezzel csökkentve vagy növelve a villanymotor fordulatszámát. Ezeket az eszközöket „invertereknek” is nevezik, annak a módszernek köszönhetően, amellyel az átalakító kimenetén a frekvencia és a feszültség egyidejű szabályozásának problémája megoldódik. Minden frekvenciaváltót szükségszerűen táblákkal kell megjelölni, amelyek jelzik jellemzőiket:
- Maximális lehetséges elektromos motor teljesítmény;
- Tápfeszültség;
- Fázisok száma (egyfázisú, háromfázisú).
A legtöbb ipari frekvenciaváltót úgy tervezték, hogy azokban működjenek háromfázisú hálózatok váltóáram, de vannak más modellek is, például frekvenciaváltók egyfázisú motorokhoz.
Villanymotoros alkalmazás
Élet modern ember Nehéz elképzelni egy ilyen mechanizmus nélkül, mint egy elektromos motor. Nézz körül – szinte mindenütt jelen vannak. Ma már nem csak minden iparágban használják, hanem a közlekedésben, a tárgyakban és a környező eszközökben is mindennapi élet, munkahelyen és otthon. Hajszárítók, ventilátorok, varrógépek, építőipari szerszámok - ez nem egy teljes lista azokról az eszközökről, ahol elektromos motorokat használnak.
Az aszinkron villanymotorok különösen megbízhatóak, ezért széles körben használják fémmegmunkáló, famegmunkáló gépek és egyéb ipari gépek hajtásaiban, kovácsoló présekben, emelőgépekben, felvonókban, szövő-, varró- és földmunkagépekben, ipari ventilátorokban, kompresszorokban, szivattyúkban , centrifugák, betonkeverők . A daru villanymotorokat a tőke-, ipari és polgári építőiparban, a bányászatban, a kohászati iparban, az energetikában és a közlekedésben használják.
Metró, villamos, trolibusz – mindezen közlekedési módok az elektromos motornak köszönhetik létezésüket. Ma már elképzelhetetlen egyetlen iroda vagy lakóépület sem klíma, sem légtisztító rendszer nélkül – ők is elektromos motorokat használnak. A legtöbb modern berendezés működése lehetetlen elektromos motor nélkül, ezért sok múlik ennek a mechanizmusnak a minőségén és megbízhatóságán. Meghibásodása nagyon szomorú eredményekhez vezethet, beleértve a termelés leállását és hatalmas anyagi veszteségeket. Ezért csak megbízható és megbízható beszállítótól vásárolhat villanymotort, aki garantálja a termék minőségét.
Az elektromos motor működési elve
Az elektromos motor működési elve a mágnesesség hatása, amely lehetővé teszi a hatékony átalakítást elektromos energia mechanikusra. Az energia átalakításának elve különböző típusok Az elektromos motorok minden típusú villanymotorra azonosak, de a motorok kialakítása és a forgónyomaték sebességének szabályozási módja eltérő lehet. Mindenki ismeri az iskolából az elektromos motor legegyszerűbb példáját - amikor egy keret forog egy állandó mágnes pólusai között. Természetesen a villanymotor kialakítása, amelyet ipari mechanizmusokban ill háztartási gépek sokkal nehezebb. Nézzük meg az iparban legelterjedtebb aszinkron villanymotor működését.
Az aszinkron villanymotor működési elve.
Működési elv aszinkron motor, mint mások, forgó mágneses mező használatán alapul. A mágneses tér forgási sebességét általában szinkronnak nevezik, mivel ez megfelel a mágnes forgási sebességének. Ebben az esetben a henger forgási sebességét általában aszinkronnak nevezik, vagyis nem esik egybe a mágnes forgási sebességével. A henger (rotor) forgási sebessége kis mértékben eltér a mágneses tér szinkron forgási sebességétől. Kényszeríteni elektromos áram forgó mágneses mező létrehozása és a forgórész forgatására való felhasználása általában háromfázisú áramot használ.
Villanymotoros készülék
A gyűrű alakú vasmag pólusainál, amelyet egy villanymotor állórészének neveznek, három tekercs van, hálózat háromfázisú áram egymáshoz képest 120°-os szögben helyezkednek el. A mag belsejében egy fémhenger van felszerelve egy tengelyre, amelyet az elektromos motor forgórészének neveznek. Ha a tekercsek egymáshoz vannak kötve, és egy háromfázisú áramhálózathoz csatlakoznak, akkor a három pólus által létrehozott teljes mágneses fluxus forog. A teljes mágneses fluxus ugyanakkor megváltoztatja irányát az állórész tekercseiben (pólusaiban) lévő áram irányának változásával. Ebben az esetben a tekercsekben lévő áram változásának egy periódusa alatt a mágneses fluxus teljes fordulatot tesz. A forgó mágneses fluxus magával viszi a hengert, és így egy aszinkron villanymotort kapunk.
Az állórész tekercseit csillagba köthetjük, de forgó mágneses tér is keletkezik, ha háromszögbe kötjük őket. Ha felcseréli a második és a harmadik fázis tekercsét, a mágneses fluxus az ellenkezőjére változtatja a forgásirányát. Ugyanez az eredmény érhető el az állórész tekercseinek felcserélése nélkül, hanem a hálózat második fázisának áramát az állórész harmadik fázisába, a hálózat harmadik fázisát az állórész második fázisába irányítva. Így tetszőleges két fázis átkapcsolásával megváltoztathatja a mágneses tér forgásirányát.
Motor csatlakozás
A modern aszinkron villanymotor állórészének nem kimondott pólusai vannak, azaz az állórész belső felülete teljesen simára van készítve. Az örvényáram-veszteségek csökkentése érdekében az állórész magja vékony sajtolt acéllemezekből készül. Az összeszerelt állórész mag acélházban van rögzítve. Az állórész nyílásaiba rézdrót tekercset helyeznek. Az elektromos motor állórészének fázistekercseit egy „csillag” vagy „delta” köti össze, amelyhez a tekercsek kezdete és vége a házba kerül - egy speciális szigetelő pajzsba. Ez az állórész nagyon kényelmes, mivel lehetővé teszi a tekercsek átkapcsolását különböző szabványos feszültségekre.
Az aszinkron motor forgórésze az állórészhez hasonlóan sajtolt acéllemezekből készül. A tekercselés a forgórész réseibe kerül. A forgórész kialakításától függően az aszinkron villanymotorokat motorokra osztják mókuskalitkás rotorés egy tekercselt rotor. A mókusketreces rotor tekercselése a forgórész hornyaiba helyezett rézrudakból készül. A rudak végei rézgyűrűvel vannak összekötve. Az ilyen típusú tekercselést mókusketrec tekercsnek nevezik. Vegye figyelembe, hogy a hornyokban lévő rézrudak nincsenek szigetelve.
4-6. AZ DC ELEKTROMOS MOTOR SZÁMÍTÁSA
A számítást egyenáramú villanymotorral kezdjük, mivel a számítása egyszerűbb és áttekinthetőbb, mint a váltakozó áramú villanymotoroké. Itt található az összes kiszámított mennyiség részletes magyarázata, amely később a váltakozóáramú motoroknál előfordul. A számítás kétpólusú, soros gerjesztésű villanymotorokra vonatkozik.
A motor teljesítményének, forgási sebességének és tápfeszültségének megadásával meghatározhatja a villanymotor összes méretét és tekercselési adatait. Az elektromos motor számítása két fő méret meghatározásával kezdődik, amelyek az armatúra átmérője és hossza. Ezeket a méreteket tartalmazza a képlet:
ahol D a horgony átmérője, m; l – horgonyhossz, m; P i - tervezési teljesítmény, W; A – lineáris armatúra terhelés, A/m; B a mágneses indukció a légrésben, T; n - névleges fordulatszám, ford./perc.
A villanymotor-armatúra hosszát és átmérőjét méterben adjuk meg, mivel ebben az esetben kényelmesebb és egyszerűbb a motor indukciós és áramlási méreteire vonatkozó számítási képletek. A méterben kapott számítási eredmények könnyen átszámíthatók centiméterre vagy milliméterre a különböző alkatrészek gyártása során.
A képlet bal oldala arányos az armatúra térfogatával. Valóban, ha megszorozzuk π-vel és elosztjuk 4-gyel, akkor megkapjuk a henger térfogatát, amely az elektromos motor armatúrája. Amint a képlet jobb oldaláról látható, az armatúra térfogata arányos a P i villanymotor teljesítményével és fordítottan arányos az n forgási sebességgel Innen arra következtethetünk, hogy minél nagyobb a forgási sebessége villanymotor-armatúra, annál kisebbek lesznek a méretei azonos teljesítmény mellett. És az elektromos motor többi részének méretei az armatúra méretétől függenek.
Az elektromos motor becsült teljesítménye, W,
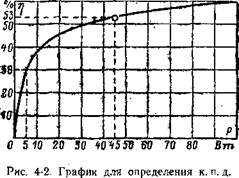
ahol E— e. d.s., amely az armatúra tekercsében indukálódik, amikor az mágneses térben forog, V; I az elektromos motor által a forrásból felvett áram, A; P az elektromos motor névleges teljesítménye, W; η a villanymotor hatásfoka, melynek értéke az ábra görbéjéből vehető. 4-2; Amint az a görbéből látható, az elektromos motor teljesítményének csökkenésével a hatékonysági értékek csökkennek.
A tervezési teljesítmény számértékét a (4-2) megoldással kapjuk meg, ahol minden mennyiség értéke ismert. A tervezési erő mindig nagyobb névleges teljesítmény villanymotor, mivel a betáplált energia egy része elveszik magában az elektromos motorban.
Az elektromos motor által fogyasztott áram, A,
ahol P a névleges teljesítmény, W; U – névleges feszültség, V; η - hatásfok az ábra görbéje szerint. 4-2.
Most meg tudjuk határozni pl. d.s. E, amelyre később szükség lesz:
ahol N az armatúra tekercs vezetékeinek száma; a 2-es tényező a nevezőben azt mutatja teljes áram a kollektorlemezről származó I armatúra a tekercs két vezetője közé ágazik, és mindegyik vezetőn csak az áram fele halad át; a πD szorzat az armatúra kerületét fejezi ki.
Így a lineáris terhelés azt mutatja meg, hogy hány amper jut az armatúra kerületének 1 m-ére. Az A lineáris terhelést és a mágneses indukciót a B légrésben elektromágneses terhelésnek nevezzük. Megmutatják, hogy az elektromos motor milyen erősen van terhelve elektromosan és mágnesesen. A (4-1) alapján egyértelmű, hogy minél nagyobb az AB szorzat, annál kisebbek lesznek az armatúra méretei. De az A és B értéke nem haladhat meg egy bizonyos határt, mert különben az elektromos motor működés közben nagyon felforrósodik.
Az elektromos motor fűtése azonban nem csak az elektromágneses terheléstől, hanem a működési idejétől is függ. Egyes elektromos motorok hosszú ideig működnek leállás nélkül, például a ventilátormotorok. Más villanymotorok szakaszosan működnek, ezalatt van idejük lehűlni, például darumodellek, elektromos lejátszók és porszívók villanymotorjait. Az elektromos motorok szakaszos működését szakaszos működésnek nevezzük. Ez azt jelenti, hogy az elektromos motor bekapcsol rövid idő, akkor szünet következik, és újra bekapcsol a villanymotor.
Az ilyen villanymotor bekapcsolásának időtartamát egy bizonyos időszak százalékában fejezzük ki, amelyet 10 percnek tekintünk. Például, ha az elektromos motor egy ideig 2,5 percig jár, a fennmaradó időben pedig áll, akkor a bekapcsolási idő 25%. Ha az elektromos motor 4 percig jár, akkor az üzemidő 40%.
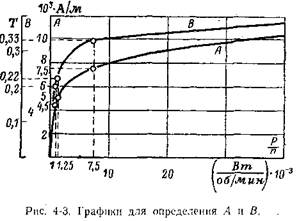
A lineáris terhelés és a mágneses indukció kiválasztása az ábra görbéi alapján történik. 4-3, ahol a vízszintes tengely a névleges teljesítmény arányát mutatja névleges frekvencia forgás. ábrán. A 4-3 az A és B értékeit adja meg a hosszú távú működésű villanymotorokhoz. Például, ha egy 80 W-os villanymotor 4000 ford./perc fordulatszámon hosszú ideig teljes terhelés mellett működik, akkor a vízszintes tengelyen a 80/4 000 = 20 10 -3 értéket ábrázoljuk. A függőleges vonalon mérjük az A = 9000 A/m lineáris terhelés és a B légrés indukciójának értékét = 0,35 T.
Szakaszos és rövid ideig tartó, 25%-os bekapcsolási idővel az elektromágneses terhelések értéke 30%-kal növelhető, azaz 1,3-szor többet vesz fel. Majd
A = 9000 1,3 = 11 700 A/m,
és mágneses indukció
B = 0,35 1,3 = 0,455 T.
Jelöljük l/D=e. A kis villanymotorok e értéke 0,4 és 1,6 között mozog. Ha rövidebb hosszúságú, de nagyobb átmérőjű villanymotort kell beszereznie, akkor vegyen e = 0,4-et. Ellenkezőleg, ha az elektromos motornak egy kis átmérőjű csőbe kell illeszkednie, akkor válassza az e = 1,6 értéket. Ha a villanymotor méreteit semmilyen feltétel nem köti, akkor általában e=1-et veszünk. Az l/D = e arány bevezetésével a bal oldalt(4-1), megszabadulunk egy ismeretlen l-től, és a (4-1) alakja:
Ha meghatároztuk D-t, azt kapjuk, hogy l=De. Így meghatározhatók az elektromos motor fő méretei.
Most térjünk át az armatúra tekercsének kiszámítására. Ehhez meg kell határoznia az elektromos motor mágneses fluxusát.
Ha a légrés mágneses indukcióját megszorozzuk azzal a területtel, amelyen keresztül az elektromos vezetékek belépnek az armatúrába, akkor megkapjuk az elektromos motor mágneses fluxusát, amelyet a görög Ф (phi) betűvel jelölünk:
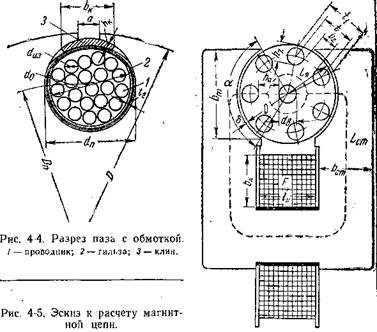
A mágneses fluxust weberekben mérik. A görög τ (tau) betű a pólusosztást jelöli, vagyis az armatúra kerületének azt a részét, amely egy pólusra esik. Kétpólusú villanymotorban a pólusosztás τ=πD/2. A görög a (alfa) betű azt jelzi, hogy a pólusosztás melyik részét foglalja el a b t pólusív (4-5. ábra). Általában a = 0,65-öt vesznek fel. Így az aτl szorzat megadja a pólus armatúra felé eső területét.
Az armatúra rések számát a Z≈3D összefüggés határozza meg, amelyben az armatúra átmérőjét centiméterben fejezzük ki. Javasoljuk, hogy az eredményül kapott számhoz legközelebb eső páratlan számot vegye. Az armatúra vezetők számát a képlet határozza meg
Az egy résben lévő vezetékek száma N z =N/Z. A számítás során kapott N z számot a legközelebbi páros egész számra kell kerekíteni, hogy a tekercselés két rétegben tekerhető legyen. A rések számának és a vezetékek számának megválasztása világos lesz az elektromos motor kiszámításának numerikus példájából.
Az armatúra tekercselés vezetékének keresztmetszete úgy határozható meg, hogy a vezetőben lévő áramot elosztjuk az áramsűrűséggel. Az áramsűrűség azt mutatja meg, hogy hány amper halad át minden egyes négyzetmilliméter vezetékkeresztmetszeten, és a görög A betűvel (delta) jelöljük. Így a vezeték keresztmetszete, mm 2,
A házi készítésű egyenáramú villanymotorok áramsűrűségét 6 és 12 A/mm 2 közötti tartományban kell megválasztani. A nagy fordulatszámú kis motoroknál az áramsűrűség a javasolt felső értékhez közelebb kerül. Nagyobb, kisebb fordulatszámú motoroknál ez közelebb van az alacsonyabb értékhez.
Ez a huzalmérő s előzetes. A táblázat második oszlopában. A 4-1. ábrán meg kell találnia egy szabványos vezeték keresztmetszetét, amely a legközelebb van a számítotthoz. A táblázat első oszlopában a d huzalátmérőt találjuk. A szükséges átmérőjű huzal hiánya nem akadályozhatja meg az elektromos motor gyártását, mivel nagy lehetőségek vannak a huzal cseréjére. Először is, egy vezetéket ki lehet cserélni két vezetékre, ha ezeknek a vezetékeknek a keresztmetszete megegyezik a cserélendő vezetékével. A huzal keresztmetszete az átmérőjének négyzetétől függ, ami azt jelenti, hogy a 2-szer kisebb keresztmetszetű huzal átmérője √2-szer kisebb lesz. Például egy 0,29 mm átmérőjű vezeték helyett két 0,2 mm átmérőjű vezetéket vehet igénybe. Ebben az esetben az áramsűrűség szinte változatlan marad, de a horonyban lévő vezetékek száma 2-szeresére nő. A horony vezetékekkel való kitöltésének sűrűsége is nő, mivel minden vezeték kétrétegű szigeteléssel rendelkezik. Az ilyen tekercset nehezebb lesz feltekerni. Egy vezetéket kicserélhet kettőre különböző átmérők. Például egy 0,29 mm átmérőjű huzal helyett két vezetéket vehet igénybe: az egyik 0,31 mm átmérőjű, a másik pedig 0,27 mm átmérőjű. Ahogy a táblázatból is látszik. 4 1, a két cserehuzal keresztmetszetének összege megegyezik a kicserélt vezeték keresztmetszetével:
0,075 + 0,057 = 0,132 mm 2.
Miután végül kiválasztotta a d huzalátmérőt, a táblázatot kell használnia. 4-2 határozza meg az átmérőt szigetelt vezeték d-től, δ kétoldali vastagság hozzáadása a szigeteléstől:
Határozzuk meg a horony méreteit. A tekercsvezetők elhelyezéséhez szükséges S, mm 2 horonykeresztmetszet a következő képlettel számítható ki:
ahol k з a horonytöltési együttható, amely megmutatja, hogy a vezetők milyen szorosan töltik ki a hornyot.
Minél alacsonyabb a kitöltési tényező, annál nagyobbnak kell lennie a horonyfelületnek. Minél nagyobb a kitöltési tényező és minél vastagabb a résszigetelés, annál nehezebb a tekercselés. Házilag gyártott villanymotoroknál ajánlatos 0,2 mm vastagságú elektromos kartonból készült hornyolt karmantyúval 2 szigetelni. A tekercs tetején lévő horonyba egy 0,3 mm vastag kartonból készült éket 3 helyeznek be (4-4. ábra). A számításoknál a k 3 =0,4 kitöltési tényezőt veheti fel.
A gyárilag gyártott villanymotorokban a nyílások összetett körte alakúak (lásd a 2-10. ábrát) több karmester anélkül, hogy gyengítené a fogak vastagságát a hornyok között. Házilag gyártott villanymotoroknál a legegyszerűbb kerek réseket fúrni az összenyomott armatúra magba (4-5. ábra).
A horony átmérőjét a keresztmetszete határozza meg:
A szomszédos hornyok középpontjai közötti távolság, mm,
és fogvastagság, mm,
A fog vastagsága szűk helyen legalább 2 mm legyen. Ha a számítás szerint a fog vastagsága kisebb, mint 2 mm, akkor növelni kell a horgony átmérőjét. Az a horony nyílása 1 mm-rel nagyobb legyen, mint a szigetelt vezeték átmérője.
Az elektromos motorok kollektorlemezeinek száma per alacsony feszültség(12 V és az alatti) egyenlő az armatúra rések számával. Az armatúra tekercsének hornyokba fektetését és a kollektorlapokhoz való csatlakoztatását a fejezet ismerteti. 5. Az S sch szén-grafit kefe cm 2 keresztmetszetét a következő képlet szerint választjuk ki:
Ahol? u az áramsűrűség az ecset alatt, ? u =5÷8 A/cm2.
Ezzel a horgony számítása véget ért.
Térjünk át a mágneses rendszer és a mező tekercs kiszámítására. Házi készítésű villanymotorhoz a legegyszerűbb egy nyitott típusú mágneses rendszer használata (4-5. ábra). A számítás során mindenekelőtt az armatúra és a pólusok közötti δ légrést határozzuk meg. Az egyenáramú gépeknél a légrés nagyságát a képlet határozza meg
A pólusív szöge az a = 0,65 értékből adódik. Egy fél kör 180°-ot foglal el; ezért a = 180° 0,65 = 117°, 120°-ra kerekítve.
A mágneses áramkör méreteit a szakaszaiban javasolt mágneses indukció alapján számítják ki. A pólusok és a keret keresztmetszetének kiszámításakor a mágneses fluxus 10% -kal nő, mivel a vonalak egy része a keret oldalai között zárva van, megkerülve az armatúrát. Ezért a pólusok és a keret mágneses fluxusa F st = 1,1 F.
Az indukciót az ágyban vettük B st = 0,5 T. Hossz elektromos vezeték a keretben az L st a vázlatból van meghatározva (4-5. ábra). Itt a szaggatott vonal mutatja a mágneses fluxus útját. A következő részekből áll: két légrés, két fog, egy horgony és egy keret. Hogy megtudja, melyik n. Vel. gerjesztőtekercset kell létrehozni, ki kell számítani n-t. Vel. (Iw) minden egyes szakaszhoz, majd adja össze őket. Kezdjük el számolni az n-t. Vel. a légrésből.
Két légrés mágneses ereje:
ahol δ a légrés az armatúra egyik oldalán, m; k δ a légrés együtthatója, amely figyelembe veszi, hogy a légrés mágneses ellenállása mennyivel növekszik az armatúrán lévő hornyok miatt; tekinthető k δ =1,1; B - indukció a légrésben, T.
Az n. Vel. A horgony fogainak meghatározásához ismernie kell a fog indukcióját. A fog vastagságát a (4-12) határozza meg. A mágneses fluxus az armatúra kerületének azon a részén lép be a fogba, amelyet a fog egy koronája és a horony egy rése foglal el. Ezt t 1 fogosztásnak nevezik, és a képlet határozza meg
Az indukció a fogban annyiszor nagyobb lesz, mint a légrés indukciója, ahányszor kisebb a fog vastagsága, mint a fogosztás. Ezenkívül figyelembe kell venni, hogy az armatúra hosszának egy részét az armatúra acéllemezei közötti szigetelőrétegek foglalják el, amelyek körülbelül 10%-át teszik ki. Ezért a fog indukciója a képlettel határozható meg
Ez az indukció a táblázat szerint. 4-3 a H z térerősségnek felel meg. Az n kiszámításához. Vel. két fogmagassággal, H z-t meg kell szorozni a fogmagasság duplájával. Figyelembe véve azonban, hogy kerek hornyok esetén a fog felső és alsó részén az indukció csökken, szorozzuk meg H z-t egy fog magasságával lw z = H z h z .
Az armatúramagban az indukció számításakor figyelembe kell venni, hogy a benne lévő mágneses fluxus elágazik, és ezért a fluxusnak csak a fele esik egy szakaszra. ábra szerinti armatúramag metszete. 4-5 egyenlő a horony aljától a tengelyig mért távolsággal, megszorozva az armatúra hosszával l:
Figyelembe kell venni a lapok közötti szigetelő rétegeket is. Így az indukció az armatúra magjában
Ez az indukció a táblázat szerint. 4-3 megfelel N i-nek. Az armatúra mag mágnesező ereje:
ahol L i a tápvezeték hossza a magban, m az ábra szerint. 4-5:
ábrán látható. A 4-5. ábrán látható, hogy ennek a villanymotornak nincsenek kiálló pólusai, mivel össze vannak kapcsolva a kerettel. Ezért a mágneses áramkör álló részének kiszámítása a keret kiszámításáig megy le. A meder szélességét az adott indukció határozza meg B = 0,5 T, m,
A 0,5 T indukcióhoz tartozó H st térerősség a táblázatban található. 4-3. A keretben lévő tápvezeték hosszának meghatározásakor nehézségbe ütközünk, mivel a keret oldalának hossza függ a tekercs vastagságától, és ezt még nem ismerjük. Ezért vesszük a tekercs vastagságát b k = 30 δ, ahol δ a légrés. A tekercs vastagsága és a rés közötti összefüggést az magyarázza, hogy az n elsősorban a rés méretétől függ. Vel. tekercsek, és ezért a tekercs méretei. Miután a vázlatból meghatározta a tápvezeték hosszát az L st keretben, kiszámíthatja az n értéket. Vel. ágyak:
Most adjunk hozzá n-t. Vel. minden szakasz:
Ilyen n. Vel. a tekercsnek létre kell hoznia, amikor az elektromos motor alapjáraton működik. De terhelés alatt, amikor az armatúrában lévő áram növekszik, az armatúra mágneses terének demagnetizáló hatása jelenik meg. Ezért n. Vel. a tekercseknek rendelkezniük kell némi tartalékkal, amelyet a képlet számít ki
Így a n. Vel. tekercsek motorterhelés alatt
![]()
Az armatúra árama áthalad a gerjesztő tekercsen, ezért a tekercs fordulatszáma w = Iw/I lesz.
A vezeték keresztmetszetének meghatározásához el kell osztani az áramerősséget az áramsűrűséggel. Kevesebbet vesz igénybe, mint az armatúra tekercsénél, mivel a tekercs menetei állóak, ezért kevésbé jól hűlnek.
Tekercs vezeték keresztmetszete, mm 2, s = I/?.
táblázat szerint A 4-1. ábrán megtaláljuk a vezeték legközelebbi szabványos keresztmetszetét és átmérőjét. Miután kiválasztotta a huzal márkáját, a táblázat szerint. A 4-2. ábrán megtaláljuk a szigetelt vezeték átmérőjét d pz. A tekercs vastagságának megállapításához ismernie kell a tekercs menetei által elfoglalt területet, mm 2, amelyet a képlettel lehet meghatározni.
A területet elosztva a tekercs hosszával, amelyet a vázlaton l k-val jelöltünk, megkapjuk a tekercs vastagságát, mm,
Tehát az elektromos motor névleges adatai szerint, amelyeket mindössze három számmal fejeznek ki, képletek és táblázatok segítségével meghatároztuk az elektromos motor gyártásához szükséges összes méretet. A tervezett villanymotor megbízhatóan működik, fűtése nem haladja meg a megengedett mértéket. Ez egy villanymotor számításának értéke. Lehetséges lenne mindezeket a méreteket „kitalálni” számítások nélkül? Valószínűleg többször át kellene dolgozni a villanymotort a kielégítő eredmény érdekében, többszörösen több időt fordítva ezekre a változtatásokra, mint a számításra, nem beszélve a sérült anyagokról. Ezen kívül a számítási folyamat során készségeket szerez a műszaki számításokban és ismereteket az elektromos gépek elméletéről.
N.V. Vinogradov, Yu.N. Vinogradov
Hogyan számítsunk ki és készítsünk saját kezűleg egy villanymotort
Moszkva 1974
Az elektromos motor kiválasztásának feltételei
A katalógusban szereplő elektromotorok egyikének kiválasztása helyesnek tekinthető, ha a következő feltételek teljesülnek:
a) a villanymotor legteljesebb megfelelése a munkagépnek (hajtásnak) mechanikai tulajdonságait tekintve.
Ez azt jelenti, hogy az elektromos motornak olyan mechanikai jellemzővel kell rendelkeznie, hogy a hajtást működés közben és indításkor is biztosítani tudja a szükséges sebesség- és gyorsulásértékeket;
b) az elektromos motor teljesítményének maximális kihasználása működés közben. Az elektromos motor összes aktív részének hőmérséklete a legsúlyosabb üzemi körülmények között a lehető legközelebb legyen a szabványokban meghatározott fűtési hőmérséklethez, de ne haladja meg azt; c) az elektromos motor megfelelősége a hajtásnak és a feltételeknek
környezet
tervezés szerint; 
d) az elektromos motor megfelelősége az őt ellátó hálózat paramétereinek.
b) a mechanizmus hajtótengelyének maximális teljesítménye, ha az üzemmód hosszú és a terhelés állandó, és más esetekben - a teljesítmény vagy az ellenállási pillanat változásának grafikonja az idő függvényében;
c) a mechanizmus hajtótengelyének forgási sebessége;
d) a mechanizmusnak a villanymotor tengelyével való összekapcsolásának módja (ha vannak fogaskerekek, a sebességváltó típusa és az áttételi arány feltüntetve);
e) az indítónyomaték nagyságát, amelyet a mechanizmus hajtótengelyén lévő villanymotornak biztosítania kell;
f) a hajtott mechanizmus fordulatszám-szabályozási határértékei, jelezve a felső és alsó sebességértékeket, valamint a megfelelő teljesítmény- és nyomatékértékeket;
g) a szükséges fordulatszám-beállítás jellege és minősége (simasága, lépésenkénti);
h) a hajtás indításának vagy aktiválásának gyakorisága óránként; i) a környezet jellemzői.
A villanymotor kiválasztása minden körülmény alapján a katalógus adatai szerint történik.
A széles körben használt mechanizmusok esetében a villanymotor kiválasztása nagymértékben leegyszerűsödik a gyártók vonatkozó információiban szereplő adatok miatt, és az elektromos motor típusának a hálózati paraméterek és a környezet jellege függvényében történő megadásához vezet.
Villanymotorok kiválasztása teljesítmény szerint
A villanymotor teljesítményének megválasztását a munkagép terhelési jellegének megfelelően kell megválasztani. 
Ezt a karaktert két kritérium alapján értékelik:
a) a névleges üzemmód szerint;
b) az elfogyasztott energia mennyiségének változásával.
A következő üzemmódok különböztethetők meg: a) hosszú (hosszú), amikor a munkaidő olyan hosszú, hogy az elektromos motor fűtése
eléri állandósult állapotát (például szivattyúk, szállítószalagok, ventilátorok stb.); b) rövid távú, amikor a munkaidő időtartama nem elegendő az elektromos motor számára hőmérséklet - fűtés
, az adott terhelésnek megfelelő, a leállási időszakok pedig éppen ellenkezőleg, elegendőek ahhoz, hogy a villanymotort környezeti hőmérsékletre hűtsék. Sokféle mechanizmusú villanymotor működhet ebben az üzemmódban;
c) szakaszos - 15, 25, 40 és 60% relatív kapcsolási időtartammal, egy ciklus időtartama nem haladja meg a 10 percet (például daruk, egyes szerszámgépek, egyállomásos hegesztőmotor-generátorok stb. .).
a) állandó terhelés, ha az üzem közben felvett teljesítmény állandó, vagy kismértékben eltér az átlagos értéktől, mint például centrifugálszivattyúk, ventilátorok, állandó légáramlású kompresszorok stb.;
b) változó terhelés, amikor az elfogyasztott energia mennyisége időszakosan változik, például kotrógépeknél, daruknál, egyes szerszámgépeknél stb.;
c) pulzáló terhelés, amikor az elfogyasztott teljesítmény mennyisége folyamatosan változik, mint például a dugattyús szivattyúk, pofatörők, sziták stb.
Az elektromos motor teljesítményének három feltételnek kell megfelelnie:
a) normál fűtés működés közben; 
b) elegendő túlterhelhetőség;
c) elegendő indítónyomaték.
Minden villanymotor két fő csoportra osztható:
a) hosszú távú üzemmódhoz (a kapcsolási időtartam korlátozása nélkül);
b) szakaszos üzemmódhoz 15, 25, 40 és 60%-os kapcsolási idővel.
Az első csoportnál a katalógusok és az útlevelek azt a folyamatos teljesítményt jelzik, amelyet a villanymotor korlátlan ideig képes kifejleszteni, azt a teljesítményt, amelyet a villanymotor megszakításokkal tud kifejleszteni, tetszőlegesen hosszú ideig, bizonyos aktiválási idővel.
Minden esetben a helyes választás egy olyan villanymotor, amely a munkagép által meghatározott ütemterv szerinti terheléssel dolgozva eléri minden alkatrészének teljes megengedett fűtését. Az ún. „teljesítménytartalékkal” rendelkező, a terhelési ütemterv szerinti lehető legnagyobb terhelésen alapuló villanymotor kiválasztása a villanymotor alulkihasználásához, ennek következtében a csökkenés miatt a tőkeköltségek és az üzemeltetési költségek növekedéséhez vezet. teljesítménytényezőkben és hatékonyságban.
A motor teljesítményének túlzott növekedése gyorsítás közben is rángatózáshoz vezethet.
Ha egy villanymotornak hosszú ideig állandó vagy enyhén változó terheléssel kell működnie, akkor teljesítményének meghatározása nem nehéz, és általában empirikus együtthatókat tartalmazó képletekkel történik.
Sokkal nehezebb kiválasztani az elektromos motorok teljesítményét más üzemmódokban.
A rövid távú terhelést az jellemzi, hogy a kapcsolási periódusok rövidek, és a szünetek elegendőek a villanymotor teljes lehűtéséhez. Feltételezzük, hogy a villanymotor terhelése a kapcsolási periódusok alatt állandó vagy csaknem állandó marad.
Ahhoz, hogy a villanymotort ebben az üzemmódban fűtésre megfelelően lehessen használni, úgy kell megválasztani, hogy a hosszú távú (katalógusokban feltüntetett) teljesítménye kisebb legyen, mint a rövid távú terhelésnek megfelelő teljesítmény, azaz hogy a villanymotornak termikus túlterhelése van a rövid távú működés időszakában.
Ha a villanymotor üzemideje lényegesen rövidebb, mint a teljes felfűtéséhez szükséges idő, de a bekapcsolási időszakok közötti szünetek lényegesen rövidebbek, mint a teljes lehűlés ideje, akkor szakaszos terhelés lép fel.
A gyakorlatban az ilyen munkák két típusát kell megkülönböztetni:
a) a munkaidő alatti terhelés állandó nagyságú, ezért grafikonját szünetekkel váltakozó téglalapok ábrázolják;
b) a munkaidő alatti terhelés többé-kevésbé bonyolult törvény szerint változik.
A villanymotor teljesítmény szerinti kiválasztásának problémája mindkét esetben megoldható analitikusan és grafikusan is. Mindkét módszer meglehetősen összetett, ezért gyakorlatilag egy egyenértékű, egyszerűsített módszer, amely három módszert foglal magában, ajánlott:
a) átlagos négyzetáram;
b) négyzetes átlagteljesítmény;
c) négyzetnyomaték középértéke.
Az elektromos motor mechanikai túlterhelhetőségének ellenőrzése
A villanymotor teljesítményének a fűtési viszonyoknak megfelelő megválasztása után ellenőrizni kell a villanymotor mechanikai túlterhelhetőségét, azaz meg kell győződni arról, hogy üzem közben a maximális terhelési nyomaték az ütemterv szerint, az indításkor pedig a nyomaték. nem haladja meg a katalógusban szereplő maximális nyomatékértékeket. 
Az aszinkron és szinkron villanymotoroknál a megengedett mechanikai túlterhelés mértékét a borulási elektromágneses nyomatékuk határozza meg, amelynek elérésekor ezek a villanymotorok leállnak.
A maximális nyomatékok névleges nyomatékokhoz viszonyított többszörösének 1,8-nak kell lennie a háromfázisú, csúszógyűrűs aszinkron villanymotoroknál, és legalább 1,65-nek ugyanazon mókusketreces villanymotoroknál.
A szinkron villanymotor maximális nyomatéksokasága szintén nem lehet kisebb 1,65-nél névleges feszültség, frekvencia és gerjesztőáram mellett, 0,9 teljesítménytényezővel (vezetőáramnál).
Az egyenáramú villanymotorok megengedett túlterhelését az üzemi feltételek határozzák meg, és a GOST szerint 2-4 nyomaték között mozog, az alsó határ a párhuzamos gerjesztésű villanymotorokra, a felső határ a soros gerjesztésű villanymotorokra vonatkozik.
Ha az ellátó és elosztó hálózatok terhelésérzékenyek, akkor a mechanikai túlterhelhetőséget a hálózatok feszültségveszteségének figyelembevételével kell ellenőrizni.
Aszinkron mókuskalitkás és szinkron villanymotoroknál a kezdeti nyomaték többszörösének legalább 0,9-nek kell lennie (a névlegeshez viszonyítva).
Valójában a kettős mókusketreces és mély hornyú villanymotorok kezdeti nyomatékának többszöröse sokkal magasabb, és eléri a 2-2,4-et.
A villanymotor teljesítményének megválasztásánál figyelembe kell venni, hogy a villanymotorok fűtését a bekapcsolás gyakorisága befolyásolja. A megengedett kapcsolási frekvencia a normál szliptől, a forgórész lengési nyomatékától és a többszörösségtől függ indítóáram.
A normál típusú aszinkron villanymotorok 400 és 1000 közötti terhelést tesznek lehetővé, a megnövelt csúszással rendelkező villanymotorok pedig óránként 1100 és 2700 közötti indítást tesznek lehetővé. Terhelés alatti indításkor a megengedett indítások száma jelentősen csökken.
A mókuskalitkás forgórészes villanymotorok indítóárama nagy, és ez a körülmény gyakori indítások, és különösen megnövekedett gyorsulási idő esetén fontos.
Ellentétben a fázisrotoros villanymotorokkal, amelyeknél az indításkor keletkező hő egy része a reosztátban, azaz a gépen kívül szabadul fel, a mókuskalitkás villanymotoroknál az összes hő magában a gépben szabadul fel, ami fokozott melegedését okozza. Ezért ezen villanymotorok teljesítményének megválasztásánál figyelembe kell venni a felfűtést számos indításkor.
Az elektromos motor kiválasztásának feltételei
A katalógusban szereplő elektromotorok egyikének kiválasztása helyesnek tekinthető, ha a következő feltételek teljesülnek:
a) a villanymotor legteljesebb megfelelése a munkagépnek (hajtásnak) mechanikai tulajdonságait tekintve.
Ez azt jelenti, hogy az elektromos motornak olyan mechanikai jellemzővel kell rendelkeznie, hogy a hajtást működés közben és indításkor is biztosítani tudja a szükséges sebesség- és gyorsulásértékeket;
c) a villanymotor tervezési szempontból megfelel a hajtás és a környezeti feltételeknek;
környezet
tervezés szerint;
d) az elektromos motor megfelelősége az őt ellátó hálózat paramétereinek.
b) a mechanizmus hajtótengelyének maximális teljesítménye, ha az üzemmód hosszú és a terhelés állandó, és más esetekben - a teljesítmény vagy az ellenállási pillanat változásának grafikonja az idő függvényében;
c) a mechanizmus hajtótengelyének forgási sebessége;
d) a mechanizmusnak a villanymotor tengelyével való összekapcsolásának módja (ha vannak fogaskerekek, a sebességváltó típusa és az áttételi arány feltüntetve);
e) az indítónyomaték nagyságát, amelyet a mechanizmus hajtótengelyén lévő villanymotornak biztosítania kell;
f) a hajtott mechanizmus fordulatszám-szabályozási határértékei, jelezve a felső és alsó sebességértékeket, valamint a megfelelő teljesítmény- és nyomatékértékeket;
g) a szükséges fordulatszám-beállítás jellege és minősége (simasága, lépésenkénti);
h) a hajtás indításának vagy aktiválásának gyakorisága óránként; i) a környezet jellemzői.
A villanymotor kiválasztása minden körülmény alapján a katalógus adatai szerint történik.
A széles körben használt mechanizmusok esetében a villanymotor kiválasztása nagymértékben leegyszerűsödik a gyártók vonatkozó információiban szereplő adatok miatt, és az elektromos motor típusának a hálózati paraméterek és a környezet jellege függvényében történő megadásához vezet.
Villanymotorok kiválasztása teljesítmény szerint
A villanymotor teljesítményének megválasztását a munkagép terhelési jellegének megfelelően kell megválasztani.
Ezt a karaktert két kritérium alapján értékelik:
a) a névleges üzemmód szerint;
b) az elfogyasztott energia mennyiségének változásával.
A következő üzemmódok különböztethetők meg: a) hosszú (hosszú), amikor a munkaidő olyan hosszú, hogy az elektromos motor fűtése
b) rövid távú, amikor az üzemidő nem elegendő ahhoz, hogy a villanymotor elérje az adott terhelésnek megfelelő fűtési hőmérsékletet, és a leállási időszakok éppen ellenkezőleg, elegendőek ahhoz, hogy a villanymotor környezeti hőmérsékletre hűljön. Sokféle mechanizmusú villanymotor működhet ebben az üzemmódban;
, az adott terhelésnek megfelelő, a leállási időszakok pedig éppen ellenkezőleg, elegendőek ahhoz, hogy a villanymotort környezeti hőmérsékletre hűtsék. Sokféle mechanizmusú villanymotor működhet ebben az üzemmódban;
c) szakaszos - 15, 25, 40 és 60% relatív kapcsolási időtartammal, egy ciklus időtartama nem haladja meg a 10 percet (például daruk, egyes szerszámgépek, egyállomásos hegesztőmotor-generátorok stb. .).
a) állandó terhelés, ha az üzem közben felvett teljesítmény állandó, vagy kismértékben eltér az átlagos értéktől, mint például centrifugálszivattyúk, ventilátorok, állandó légáramlású kompresszorok stb.;
b) változó terhelés, amikor az elfogyasztott energia mennyisége időszakosan változik, például kotrógépeknél, daruknál, egyes szerszámgépeknél stb.;
c) pulzáló terhelés, amikor az elfogyasztott teljesítmény mennyisége folyamatosan változik, mint például a dugattyús szivattyúk, pofatörők, sziták stb.
Az elektromos motor teljesítményének három feltételnek kell megfelelnie:
a) normál fűtés működés közben;
b) elegendő túlterhelhetőség;
c) elegendő indítónyomaték.
Minden villanymotor két fő csoportra osztható:
a) hosszú távú üzemmódhoz (a kapcsolási időtartam korlátozása nélkül);
b) szakaszos üzemmódhoz 15, 25, 40 és 60%-os kapcsolási idővel.
Az első csoportnál a katalógusok és az útlevelek azt a folyamatos teljesítményt jelzik, amelyet a villanymotor korlátlan ideig képes kifejleszteni, azt a teljesítményt, amelyet a villanymotor megszakításokkal tud kifejleszteni, tetszőlegesen hosszú ideig, bizonyos aktiválási idővel.
Minden esetben a helyes választás egy olyan villanymotor, amely a munkagép által meghatározott ütemterv szerinti terheléssel dolgozva eléri minden alkatrészének teljes megengedett fűtését. Az ún. „teljesítménytartalékkal” rendelkező, a terhelési ütemterv szerinti lehető legnagyobb terhelésen alapuló villanymotor kiválasztása a villanymotor alulkihasználásához, ennek következtében a csökkenés miatt a tőkeköltségek és az üzemeltetési költségek növekedéséhez vezet. teljesítménytényezőkben és hatékonyságban.
A motor teljesítményének túlzott növekedése gyorsítás közben is rángatózáshoz vezethet.
Ha egy villanymotornak hosszú ideig állandó vagy enyhén változó terheléssel kell működnie, akkor teljesítményének meghatározása nem nehéz, és általában empirikus együtthatókat tartalmazó képletekkel történik.
Sokkal nehezebb kiválasztani az elektromos motorok teljesítményét más üzemmódokban.
A rövid távú terhelést az jellemzi, hogy a kapcsolási periódusok rövidek, és a szünetek elegendőek a villanymotor teljes lehűtéséhez. Feltételezzük, hogy a villanymotor terhelése a kapcsolási periódusok alatt állandó vagy csaknem állandó marad.
Ahhoz, hogy a villanymotort ebben az üzemmódban fűtésre megfelelően lehessen használni, úgy kell megválasztani, hogy a hosszú távú (katalógusokban feltüntetett) teljesítménye kisebb legyen, mint a rövid távú terhelésnek megfelelő teljesítmény, azaz hogy a villanymotornak termikus túlterhelése van a rövid távú működés időszakában.
Ha a villanymotor üzemideje lényegesen rövidebb, mint a teljes felfűtéséhez szükséges idő, de a bekapcsolási időszakok közötti szünetek lényegesen rövidebbek, mint a teljes lehűlés ideje, akkor szakaszos terhelés lép fel.
A gyakorlatban az ilyen munkák két típusát kell megkülönböztetni:
a) a munkaidő alatti terhelés állandó nagyságú, ezért grafikonját szünetekkel váltakozó téglalapok ábrázolják;
b) a munkaidő alatti terhelés többé-kevésbé bonyolult törvény szerint változik.
A villanymotor teljesítmény szerinti kiválasztásának problémája mindkét esetben megoldható analitikusan és grafikusan is. Mindkét módszer meglehetősen összetett, ezért gyakorlatilag egy egyenértékű, egyszerűsített módszer, amely három módszert foglal magában, ajánlott:
a) átlagos négyzetáram;
b) négyzetes átlagteljesítmény;
c) négyzetnyomaték középértéke.
Az elektromos motor mechanikai túlterhelhetőségének ellenőrzése
A villanymotor teljesítményének a fűtési viszonyoknak megfelelő megválasztása után ellenőrizni kell a villanymotor mechanikai túlterhelhetőségét, azaz meg kell győződni arról, hogy üzem közben a maximális terhelési nyomaték az ütemterv szerint, az indításkor pedig a nyomaték. nem haladja meg a katalógusban szereplő maximális nyomatékértékeket.
Az aszinkron és szinkron villanymotoroknál a megengedett mechanikai túlterhelés mértékét a borulási elektromágneses nyomatékuk határozza meg, amelynek elérésekor ezek a villanymotorok leállnak.
A maximális nyomatékok névleges nyomatékokhoz viszonyított többszörösének 1,8-nak kell lennie a háromfázisú, csúszógyűrűs aszinkron villanymotoroknál, és legalább 1,65-nek ugyanazon mókusketreces villanymotoroknál.
A szinkron villanymotor maximális nyomatéksokasága szintén nem lehet kisebb 1,65-nél névleges feszültség, frekvencia és gerjesztőáram mellett, 0,9 teljesítménytényezővel (vezetőáramnál).
Az egyenáramú villanymotorok megengedett túlterhelését az üzemi feltételek határozzák meg, és a GOST szerint 2-4 nyomaték között mozog, az alsó határ a párhuzamos gerjesztésű villanymotorokra, a felső határ a soros gerjesztésű villanymotorokra vonatkozik.
Ha az ellátó és elosztó hálózatok terhelésérzékenyek, akkor a mechanikai túlterhelhetőséget a hálózatok feszültségveszteségének figyelembevételével kell ellenőrizni.
Aszinkron mókuskalitkás és szinkron villanymotoroknál a kezdeti nyomaték többszörösének legalább 0,9-nek kell lennie (a névlegeshez viszonyítva).
Valójában a kettős mókusketreces és mély hornyú villanymotorok kezdeti nyomatékának többszöröse sokkal magasabb, és eléri a 2-2,4-et.
A villanymotor teljesítményének megválasztásánál figyelembe kell venni, hogy a villanymotorok fűtését a bekapcsolás gyakorisága befolyásolja. A megengedett kapcsolási frekvencia a normál szliptől, a forgórész lengési nyomatékától és az indítóáram többszörösétől függ.
A normál típusú aszinkron villanymotorok 400 és 1000 közötti terhelést tesznek lehetővé, a megnövelt csúszással rendelkező villanymotorok pedig óránként 1100 és 2700 közötti indítást tesznek lehetővé. Terhelés alatti indításkor a megengedett indítások száma jelentősen csökken.
A mókuskalitkás forgórészes villanymotorok indítóárama nagy, és ez a körülmény gyakori indítások, és különösen megnövekedett gyorsulási idő esetén fontos.
Ellentétben a fázisrotoros villanymotorokkal, amelyeknél az indításkor keletkező hő egy része a reosztátban, azaz a gépen kívül szabadul fel, a mókuskalitkás villanymotoroknál az összes hő magában a gépben szabadul fel, ami fokozott melegedését okozza. Ezért ezen villanymotorok teljesítményének megválasztásánál figyelembe kell venni a felfűtést számos indításkor.