Принцип действия (на примере двигателя параллельного возбуждения). Если к двигателю подведено напряжение U, то по цепи возбуждения протекает ток I в, а по цепи якоря – ток I я. Ток возбуждения создает МДС F в = I в W в, которая возбуждает в машине магнитный поток Ф в. Ток якоря, в свою очередь, создает магнитный поток реакции якоря Ф я. Результирующий магнитный поток Ф рез = Ф в + Ф я.
Концепция двигателя заключается в том, чтобы активировать поле статора и позволить полюсам ротора двигаться в нужное положение, которое обеспечивает магнитное выравнивание. Вместо обеспечения вращающегося магнитного поля или постоянного поля с коммутацией поля являются более неподвижными. Первая последовательность переключателей, показанная в 13, приведет к вращению по часовой стрелке; вторая последовательность производит вращение против часовой стрелки. Больной. 13 Диаграмма, иллюстрирующая, как последовательность переключения создает шаги движения в шаговом двигателе.

Рис.1.23 Рис. 1.24
В цепи якоря ток I я создает падение напряжения R я I я. В соответствии с законом электромагнитной силы ЭМС при взаимодействии тока I я и магнитного потока Ф рез создается вращающий момент М вр. В установившемся режиме М вр. = М пр. Когда проводники якоря пересекают магнитное поле Ф рез, в них в соответствии с законом электромагнитной индукции ЭМИ наводится ЭДС, которая направлена против напряжения сети U.
Простая концепция шагового двигателя объясняется с помощью постоянного магнита на роторе с двумя наборами полюсов на статоре. На самом деле ротор состоит из многих магнитных полюсов, выровненных с «зубцами» на роторе. Эти зубы расположены так, что только один набор зубьев находится в идеальном совмещении с полюсами статора в любой момент времени. Если мы возьмем количество раз, чтобы сила статора была применена для перемещения одного зуба на 360 ° вращения, мы можем вычислить угол шага. Например, если зуб перемещается на 360 ° с 200 ступенями мощности, шаг угла вычисляется путем деления 360 ° на 200; это дает нам 8 ° движения за шаг.
Классификация двигателей. По схеме включения обмоток возбуждения главных полюсов двигатели постоянного тока делятся на двигатели независимого, параллельного, последовательного и смешанного возбуждения.
В двигателях независимого возбуждения обмотка возбуждения питается от отдельного источника постоянного напряжения. В двигателях параллельного возбуждения обмотка возбуждения и обмотка якоря включены параллельно и питаются от одного источника. В двигателях последовательного и смешанного возбуждения есть обмотка возбуждения, включенная последовательно с обмоткой якоря. В двигателях малой мощности поток возбуждения может быть создан с помощью постоянных магнитов. Наибольшее применение находят двигатели параллельного и смешанного возбуждения.
Шаг угла определит, насколько точны этапы движения для данного двигателя. Другие типы шаговых двигателей используют ротор с высокой проницаемостью вместо ротора с постоянным магнитом. Магнитные поля ротора выровнятся и удерживают магнетизм во время работы. Эти шаговые двигатели называются шаговыми двигателями переменного сопротивления.
Большинство шаговых двигателей используют инструкции или команды, которые производятся компьютерными процессорами. Больной. 14 Шаговый двигатель и соответствующая плата контроллера. Обратите внимание на небольшой размер двигателя. Шунтирующий двигатель постоянного тока использует шунтовое поле в качестве основного магнитного поля в статоре. Шунтирующее поле состоит из нескольких витков малого провода и соединено или шунтировано поперек арматуры. Шунтирующее поле может иметь последовательный реостат для управления количеством тока в поле.
Основные уравнения и величины, характеризующие двигатели. Такими величинами являются: механическая мощность на валу Р 2, питающее напряжение U, ток, потребляемый из сети I, ток якоря I я, ток возбуждения I в, частота вращения n, электромагнитный момент М эм. Зависимость между этими величинами описывается:
Ø уравнением электромагнитного момента:
Принцип постоянного тока основан на концепции коммутации. Этот коммутатор и щеточное соединение всегда поддерживают постоянное направление тока и направление магнитного поля. Скорость и ток на роторе обратно пропорциональны. Если ротор вращается быстрее, увеличивается количество встречной э.д.с. и меньше разности напряжений и, следовательно, меньше тока. Существует много вариантов шунтирующего двигателя, используемых в специализированных целях.
Выберите правильный ответ для каждого из следующих утверждений. А. напряжения, частоты, тока и скорости. Б. напряжения, тока, скорости и крутящего момента. С. напряжения, тока и мощности. Д. напряжения, тока, скорости и мощности. Эффект генератора в двигателе дает.
М эм = С м I я Ф;
Ø уравнением электрического состояния цепи якоря:
U = Е пр + R я I я; (1.4)
Е пр = С E nФ;
Ø уравнением моментов:
М эм = М с + М пот + М д,
где М с – момент сопротивления на валу, создаваемый нагрузкой; М пот – момент потерь, создаваемый всеми видами потерь в двигателе; М д – динамический момент, создаваемый инерционными силами;
С. противоэлектродвижущая сила. Двигатель постоянного тока потребляет больше тока с механической нагрузкой, приложенной к его валу, потому что. Б. дифференциал напряжения уменьшается. Д. крутящий момент зависит от магнитной силы. Направление вращения составного межполюсного двигателя можно изменить на противоположное направление потока тока через.
С. арматуры, интерполей и рядов. Скорость двигателя постоянного тока может быть снижена ниже номинальной скорости без потери крутящего момента за счет уменьшения напряжения на. А. простота в строительстве. Б. контроль скорости выше и ниже базовой скорости.
Характеристики двигателей. Важнейшей из характеристик является механическая n (М с) – зависимость частоты вращения n от момента на валу (далее индекс «с» опускается) при U = const, I в = const. Она показывает влияние механической нагрузки (момента) на валу двигателя на частоту вращения, что особенно важно знать при выборе и эксплуатации двигателей. Другие характеристики двигателей: регулировочная n (I в), скоростная n (I я), рабочие М, Р 1, n , I, h(Р 2) – здесь подробно не рассматриваются.
С. отличный крутящий момент и контроль скорости. Заполните следующие утверждения. Поскольку двигатель постоянного тока достигает своей номинальной скорости, ток его якоря. Эти двигатели имеют два контакта. Прикладывание напряжения на клеммах приводит к пропорциональной скорости выходного вала в устойчивом состоянии.
Статор включает корпус, постоянные магниты и щетки. Ротор состоит из выходного вала, обмоток и коммутатора. Обратите внимание, что на этом снимке имеется редуктор и энкодер, подключенные к двигателю. Силы внутри двигателя, которые приводят к вращению ротора, называются силами Лоренца. Если электрон движется через магнитное поле, он испытывает силу. Если у нас есть ток, проходящий через провод в магнитном поле, провод испытывает силу, пропорциональную поперечному произведению тока и магнитного поля.
Механические характеристики могут быть естественными и искусственными. Под естественными характеристиками понимаются характеристики, снятые при отсутствии в схеме каких-либо дополнительных сопротивлений, например, реостатов в цепях якоря или возбуждения, искусственными – при наличии таких сопротивлений.
Уравнение механической характеристики двигателя. Оно может быть получено из (1.1). Подставим вместо Е ее значение в (1.4), тогда
Вы можете легко найти направление этой силы, используя Правило правой руки. Теперь представьте, что этот одиночный провод заменяется петлей провода. Между магнитами «полюса» это выглядит как два провода с током, протекающим в противоположных направлениях. Силы на проводах заставляют петлю вращаться.
Катушка состоит из многих таких петель и прикреплена к ротору и вращается. При этом величина и направление сил на проводах остаются приблизительно постоянными. Однако результирующий крутящий момент изменяется с углом. Когда начинается катушка, существует максимальный крутящий момент. По мере того, как катушка движется, рычаг момента уменьшается и крутящий момент уменьшается. Наконец, когда катушка вертикальна, крутящий момент отсутствует.
n = (U – R я I я)/С Е Ф. (1.5)
Заменяя I я его значением из (1.2), получаем уравнение механической характеристики:
n = ![]() (1.6)
(1.6)
Вид механической характеристики определяется характером зависимости потока отнагрузки двигателя, что в свою очередь зависит от схемы включения обмотки возбуждения.
Чтобы поддерживать почти постоянный крутящий момент на роторе, мы можем сделать две вещи. Во-первых, мы можем менять ток через катушку каждые пол очереди. Поэтому вместо переменного крутящего момента, такого как первый на рисунке ниже, крутящий момент всегда находится в одном направлении. Кроме того, можно использовать дополнительные катушки. Когда эти катушки смещены под разными углами вокруг двигателя, результирующий крутящий момент становится суммой кривых цветного крутящего момента на рисунке ниже.
Результирующий крутящий момент всегда больше нуля, но не является постоянным. Эта зависящая от угла вариация называется пульсацией крутящего момента. Процесс переключения направления тока называется коммутированием. Щетки прикреплены к двум внешним проводам электродвигателя, а сегменты коммутатора скользят по щелям так, чтобы ток через катушки переключался под соответствующими углами. Коммутация также может выполняться в электронном виде. На следующей диаграмме показано, как работают кисти и коммутаторы. действительный коммутатор должен иметь не менее трех сегментов.
Реверсирование двигателя. Под реверсированием двигателя понимают изменение направления вращения его якоря. Возможные способы реверсирования вытекают из соотношения (1.2). Если изменить направление тока якоря или потока машины, то знак, а следовательно, и направление вращающего момента изменяется. Практически это достигается переключением выводов или обмотки якоря, или обмотки возбуждения. Однако одновременное переключение выводов обеих обмоток или изменение полярности питающего двигатель напряжения (кроме двигателя независимого возбуждения) к изменению знака вращающего момента и, следовательно, к изменению направления вращения не приводит.
Начнем с написания уравнения сохранения энергии в двигателе. Мощность вводится как электрическая мощность, а двигатель преобразует ее в механическую мощность. Однако часть мощности теряется как тепло, из-за омического нагрева катушек двигателя. Мы можем переписать это с точки зрения электрических и механических величин как.
Определяющее уравнение двигателя. Обратная ЭДС пропорциональна скорости двигателя. Это то, как плотины создают гидроэлектроэнергию. Это уравнение позволяет нам построить кривую скорости вращения мотора. Кривая - это просто прямая линия, как показано ниже. Это максимальный крутящий момент, который может генерировать двигатель. Мы также можем рассчитать ток останова, разделив вращающий момент на постоянный двигатель. Это максимальный ток двигателя.
Пуск в ход двигателей постоянного тока. К пуску двигателей предъявляются два основных требования: обеспечить необходимый для трогания с места и разгона якоря вращающий момент и не допустить при пуске протекания через якорь чрезмерно большого тока, опасного для двигателя. Практически возможны три способа пуска: прямой пуск, пуск при включении реостата в цепь якоря и пуск при пониженном напряжении в цепи якоря.
При прямом пуске цепь якоря включается сразу на полное напряжение. Так как в первый момент пуска якорь неподвижен (n = 0), то противо-ЭДС отсутствует (Е пр = С Е nФ). Тогда из (1.4) следует, что пусковой ток якоря I я,п = U/R я.
Так как R я = 0,02 ¸ 1,10 Ом, то I я,п = (50 ¸100) I ном, что недопустимо. Поэтому прямой пуск возможен только у двигателей малой мощности, где I я,п (4¸6) I ном и разгон двигателя длится менее 1 с.
Пуск при включении пускового реостата R п последовательно с якорем рассмотрим на примере схемы рис. 1.25. Пусковой ток в этом случае равен:
I я,п = U/(R я + R п). (1.7)
Сопротивление R п = U/ I я,п – R я выбирают таким, чтобы в начальный момент пуска, когда Е пр = 0, I я,п = (1,4¸2,5) I ном (большее число относится к двигателям меньшей мощности).
По мере разгона якоря возрастает Е пр, которая снижает напряжение на якоре (т.е. уменьшается числитель (1.7)), а сопротивление реостата R п выводится.
Перед пуском реостат R р выводится, что необходимо для обеспечения максимального потока и, следовательно, момента при пуске (М п = С м I я,п Ф). По мере разгона якоря реостат R р вводится до достижения требуемой частоты вращения.
Пуск с ограниченным пусковым током возможен при питании якоря двигателя от отдельного источника (генератора, выпрямителя) с регулируемым напряжением. Ограничение пускового тока и плавный разгон двигателя обеспечиваются постепенным повышением напряжения на якоре от нуля до требуемого значения.
Рассматриваемый метод находит применение в системах управления и регулирования мощных двигателей постоянного тока (см. п.1.14.3).
§ 115. ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Рабочие свойства двигателей определяются их рабочими характеристиками, представляющими собой зависимости числа оборотов т, вращающего момента Мэ, потребляемого тока I, мощности Р1 и к. п. д. η от полезной мощности на валу Р2- Эти зависимости соответствуют естественным условиям работы двигателя, т. е. машина не регулируется и напряжение сети остается постоянным. Так
как при изменении полезной мощности Р2 (т. е. нагрузки на валу) изменяется также и ток в якоре
машины, то рабочие характеристики часто строятся в зависимости от тока в якоре. Зависимости вращающего момента и скорости вращения от тока в якоре для двигателя параллельного возбуждения изображены на рис. 152, а схема сто показана выше (см. рис. 151).
Число оборотов двигателя определяется следующим выражением:
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
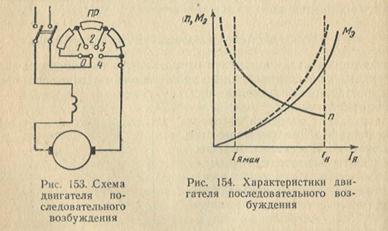
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
![]()
где rс- сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25-30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С"Iя), можно определить следующим выражением:
где K’=KC’
т.е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.