- " onclick="window.open(this.href," win2 return false >พิมพ์
- อีเมล
เฟสเดียว
ใช้งานได้จริงที่บ้าน กระแสสลับเฟสเดียวซึ่งได้มาจากเครื่องกำเนิดไฟฟ้า เครื่องปรับอากาศ- การออกแบบและหลักการทำงานของเครื่องกำเนิดไฟฟ้าเหล่านี้ขึ้นอยู่กับปรากฏการณ์ การเหนี่ยวนำแม่เหล็กไฟฟ้า- การเกิดขึ้น กระแสไฟฟ้าในตัวนำปิดเมื่อฟลักซ์แม่เหล็กไหลผ่านมีการเปลี่ยนแปลง ปรากฏการณ์นี้ถูกค้นพบโดยนักวิทยาศาสตร์ชาวอังกฤษ เอ็ม. ฟาราเดย์
(พ.ศ. 2334-2410) ในปี พ.ศ. 2374
กระแสสลับที่ใช้ในการผลิตและชีวิตประจำวันแตกต่างกันไปตามกฎหมายไซน์ซอยด์:
ฉัน
=
ฉัน
·
บาป
(2
·π·f·t
),
ที่ไหน ฉัน
- มูลค่าปัจจุบันทันที
ฉัน
- ค่าปัจจุบันของแอมพลิจูด (สูงสุด)
ฉ
- ความถี่ไฟฟ้ากระแสสลับ;
ที
- เวลา.
ในรูป ทางด้านขวาคือกราฟของกระแสสลับและระบุแอมพลิจูดและค่าปัจจุบันของกระแสสลับ ณ เวลาหนึ่ง ที .
ความถี่วัดใน เฮิรตซ์
(เฮิรตซ์) เพื่อเป็นเกียรติแก่นักวิทยาศาสตร์ชาวเยอรมัน กรัม เฮิรตซ์
(1857-1894). ในแหล่งจ่ายไฟหลัก AC คือ 50 Hz- ความถี่ของกระแสสลับเป็นตัวกำหนดความเร็วของกระบวนการเป็นระยะจำนวนการสั่นที่เกิดขึ้นต่อหน่วยเวลา วัดโดยใช้อุปกรณ์พิเศษ - เครื่องวัดความถี่
ส่วนกลับของความถี่เรียกว่าคาบการสั่น ต- มีค่าเท่ากับ 0.02 วินาทีสำหรับเครือข่ายไฟฟ้ากระแสสลับ
ความถี่ของกระแสสลับขึ้นอยู่กับความเร็วการหมุนของโรเตอร์เครื่องกำเนิดไฟฟ้าและจำนวนคู่ขั้วของตัวเหนี่ยวนำ ถูกกำหนดโดยสูตร:
|
ฉ = |
พี . n |
|
60 |
ที่ไหน พี
- จำนวนคู่ของเสาเหนี่ยวนำ
n
- ความเร็วในการหมุนของโรเตอร์ต่อนาที
หากเครื่องกำเนิดไฟฟ้ามีขั้วหนึ่งคู่ โรเตอร์ของเครื่องกำเนิดไฟฟ้าจะหมุนด้วยความเร็ว 3,000 รอบต่อนาทีเพื่อผลิตกระแสสลับที่มีความถี่ 50 เฮิรตซ์
กระแสสลับเช่นกระแสตรงสามารถผลิตได้ ผลความร้อน- ไส้หลอดของหลอดไฟได้รับความร้อนจากทั้งกระแสสลับและกระแสตรง ดังนั้นการเปรียบเทียบผลกระทบทางความร้อนของกระแสตรงและกระแสสลับ (ถาม
=
=
ถาม
-
_
),
รับอัตราส่วนระหว่างกระแสที่มีประสิทธิภาพ (ประสิทธิผล) และกระแสสูงสุด:
|
|
ฉัน = |
ฉัน |
อยู่ที่ 0.7· ฉัน ม |
|
|
|
√2 |
|
|
|
อืม |
อืม |
อยู่ที่ 0.7 ม |
|
|
|
√2 |
|
ที่ไหน ฉัน
,
คุณ
- ค่าที่มีประสิทธิภาพกระแสและแรงดัน
ฉัน
,
อืม
- ค่ากระแสและแรงดันสูงสุด
เครื่องมือวัดที่รวมอยู่ในวงจรไฟฟ้ากระแสสลับจะระบุค่าประสิทธิภาพของกระแสหรือแรงดันไฟฟ้า
กระแสสลับของแรงดันไฟฟ้าหนึ่ง ต่างจากไฟฟ้ากระแสตรง สามารถแปลงเป็นไฟฟ้ากระแสสลับของแรงดันไฟฟ้าอื่นได้อย่างง่ายดายโดยใช้หม้อแปลงไฟฟ้า
หม้อแปลงไฟฟ้า เรียกว่าอุปกรณ์แม่เหล็กไฟฟ้าที่ทำหน้าที่แปลงกระแสสลับของแรงดันไฟฟ้าหนึ่งให้เป็นกระแสสลับของแรงดันไฟฟ้าอื่นที่ความถี่คงที่ของกระแสไฟฟ้า หม้อแปลงไฟฟ้าถูกนำมาใช้กันอย่างแพร่หลายในการส่งและจำหน่าย พลังงานไฟฟ้าเครื่องปรับอากาศ เป็นเฟสเดียวและสามเฟส
หม้อแปลงไฟฟ้าเฟสเดียวประกอบด้วย แกนกลางและ สองขดลวด ลวดหุ้มฉนวน- แกนหม้อแปลงทำจากแผ่นเหล็กไฟฟ้าและทำหน้าที่เป็นวงจรแม่เหล็ก เหล็กแผ่นเคลือบด้วยวานิชเพื่อลดการสูญเสียพลังงานในแกนกลาง ขดลวดที่เชื่อมต่อกับเครือข่ายเรียกว่าขดลวดหลักและขดลวดที่แรงดันไฟฟ้าถูกถอดออกเรียกว่าขดลวดทุติยภูมิหม้อแปลงไฟฟ้าที่ขดลวดทุติยภูมิมีจำนวนรอบมากกว่าขดลวดหลัก เพิ่มขึ้นและหม้อแปลงไฟฟ้าที่ขดลวดทุติยภูมิมีรอบน้อยกว่าขดลวดปฐมภูมิ ลง- เปลี่ยนอัตราส่วนว 1 และว 2 ของขดลวดทั้งสองของหม้อแปลงไฟฟ้าจะเท่ากับอัตราส่วนแรงดันไฟฟ้าคุณ 1 และคุณ 2 ที่ขั้วของขดลวดและเรียกว่า อัตราส่วนการเปลี่ยนแปลง ถึง , เช่น.
|
|
เค= |
ว 1 |
= |
ยู1 |
|
|
ว 2 |
ยู 2 |
ด้วยการสูญเสียพลังงานเล็กน้อยในหม้อแปลง (1-3%) จึงสามารถสันนิษฐานได้ว่ากำลังในวงจรทุติยภูมิของหม้อแปลงมีค่าเท่ากับกำลังในปฐมภูมิโดยประมาณ แล้วพี 2 หยาบคาย พี 1 หรือฉัน 2 . คุณ 2 ≈ ฉัน 1 . คุณ 1 , ที่ไหน
|
|
ฉัน 2 |
= |
คุณ 1 |
= |
ว 1 |
= เค |
|
|
ฉัน 1 |
ยู 2 |
ว 2 |
ดังนั้นกระแสในขดลวดของหม้อแปลงจึงแปรผกผันกับแรงดันไฟฟ้าและดังนั้นกับจำนวนรอบของขดลวด ซึ่งหมายความว่าในหม้อแปลงแบบสเต็ปอัพ กระแสไฟฟ้าในขดลวดทุติยภูมิจะน้อยกว่าในขดลวดปฐมภูมิ ดังนั้นขดลวดทุติยภูมิจึงสามารถทำจากลวดที่บางกว่าได้ ในหม้อแปลงแบบสเต็ปดาวน์ ตรงกันข้าม ขดลวดทุติยภูมิจะมีหน้าตัดลวดขดลวดที่ใหญ่กว่าขดลวดหลัก
ในการเปลี่ยนแรงดันไฟฟ้าภายในขอบเขตเล็ก ๆ จะใช้หม้อแปลงที่มีขดลวดเดียว - หม้อแปลงไฟฟ้าอัตโนมัติซึ่งเปรียบเสมือนหม้อแปลงที่มี การเชื่อมต่อแบบอนุกรมขดลวด
แนวคิดพื้นฐานและคำจำกัดความ
ใช้กันอย่างแพร่หลายใน วงจรไฟฟ้าหา EMF เป็นระยะ แรงดันและกระแส .
ปริมาณเป็นระยะ การเปลี่ยนแปลงเมื่อเวลาผ่านไปในค่าและทิศทาง และการเปลี่ยนแปลงเหล่านี้จะเกิดขึ้นซ้ำในช่วงเวลาหนึ่ง ต, เรียกว่า ระยะเวลา.
ในทางปฏิบัติ กระแสสลับ (เครื่องกำเนิดไฟฟ้าของโรงไฟฟ้า) ในอุตสาหกรรมส่วนใหญ่สร้าง EMF ที่แตกต่างกันไปตามกฎหมายไซนัสซอยด์
ข้อดีของกฎหมายดังกล่าว:
ก) ความสะดวกในการได้มา;
b) ความตึงเครียดเปลี่ยนได้ง่าย
c) ฟังก์ชั่นไซน์ซอยด์เป็นฟังก์ชั่นเดียวที่ไม่เปลี่ยนรูปร่างในระหว่างกระบวนการรวมและความแตกต่างและในระหว่างกระบวนการส่งและการเปลี่ยนแปลง (ในกระบวนการเปลี่ยนรูป) ของแรงดันไฟฟ้าการพึ่งพาเวลายังคงไม่เปลี่ยนแปลงเช่น ไซน์
ปริมาณตามคาบใดๆ ที่เปลี่ยนแปลงตามกฎไซน์ซอยด์จะมีพารามิเตอร์ลักษณะเฉพาะหลายประการ:
ระยะเวลา - ต[ค];
2) ความถี่ - ฉ[เฮิร์ตซ์]
ส่วนกลับของงวดเรียกว่า ความถี่ :
ความถี่ในการติดตั้งระบบไฟฟ้าทั้งหมดเป็นมาตรฐานอย่างเคร่งครัด:
สำหรับระบบภาคพื้นดิน - 50 (60) Hz;
ในการบิน - 400Hz;
ยานอวกาศ - 1,000Hz
การเพิ่มความถี่ทำให้สามารถลดขนาดการติดตั้งระบบไฟฟ้าได้
3) ความถี่วงจร - ω=2πf.
สำหรับความถี่ 50Hz ความถี่ไซคลิกคือ ω=2*3.14*50=314rad/s หรือ 1/s
4) มูลค่าทันที - มูลค่าของปริมาณที่เปลี่ยนแปลงเป็นระยะ ณ ช่วงเวลาที่พิจารณา
ค่าทันทีแสดงถึง - อี ฉัน คุณ
5) ค่าแอมพลิจูด
ค่าสูงสุดหรือแอมพลิจูดของ EMF แรงดันและกระแสแสดงโดย - อี ม , ยู ม ,ฉัน ม .
6) คุณค่าที่มีประสิทธิภาพ
ค่าประสิทธิผลของ EMF แรงดันและกระแสแสดงโดย - อี ยู ฉัน
หากต้องการหาปริมาณกระแสไซน์ซอยด์ซึ่งเปลี่ยนแปลงอย่างต่อเนื่องและเป็นช่วงๆ เมื่อเวลาผ่านไป ให้ใช้ค่าดังกล่าว ดี.ซีเทียบเท่ากับค่ากระแสสลับสำหรับงานที่ทำ ค่านี้จะเป็น ปัจจุบัน สำหรับกระแสไซน์
ค่าที่มีประสิทธิผล (หรือประสิทธิผล)กระแสไซน์คือค่าของกระแสตรงที่ไหลในตัวต้านทานตัวเดียวกันกับความต้านทาน ร ในช่วงระยะเวลาหนึ่ง ตความร้อนปริมาณเท่ากันจะถูกปล่อยออกมาเช่นเดียวกับระหว่างที่กระแสไซน์ผ่าน
สำหรับกระแสไซน์ซอยด์:
ฉัน=ฉัน มบาปω ที
ปริมาณความร้อนที่เกิดขึ้นในตัวต้านทาน รทันเวลา ตเท่ากับ:
 ,
,
และที่กระแสคงที่
 .
.
ตามคำนิยาม ถาม ≈ =ถาม - , แล้ว
 ,
,
 .
.
ดังนั้นค่าประสิทธิผลของกระแสไซน์ซอยด์ ฉัน คือค่ากำลังสองเฉลี่ยรากของงวดนั้น ต
ค่าประสิทธิผลของกระแสสลับถูกกำหนดให้เป็นกระแสตรงและเข้า  น้อยกว่าแอมพลิจูดของมันหลายเท่า
น้อยกว่าแอมพลิจูดของมันหลายเท่า
เช่นเดียวกัน

 .
.
เครื่องมือวัดทางไฟฟ้าส่วนใหญ่ทำงานโดยใช้ผลกระทบทางความร้อนหรือไฟฟ้าไดนามิก ดังนั้นจึงแสดงค่าที่มีประสิทธิภาพเสมอ การคำนวณพื้นฐานของวงจรไฟฟ้าของกระแสไซน์ซอยด์ดำเนินการโดยใช้ค่าที่มีประสิทธิผล สำหรับปริมาณที่ไม่ใช่ไซนูซอยด์ อัตราส่วนเหล่านี้จะแตกต่างออกไป
7) ค่าเฉลี่ย
ค่าเฉลี่ย ค่าไซน์ซอยด์คือค่าเฉลี่ยเลขคณิต อย่างไรก็ตาม หากเรากำหนดค่าเฉลี่ยของค่าไซน์ซอยด์ในช่วงเวลาหนึ่ง ตจากนั้นจะเท่ากับศูนย์ เนื่องจากครึ่งคลื่นบวกและลบของเส้นโค้งไซน์มีรูปร่างตรงกัน ดังนั้นจึงกำหนดค่าเฉลี่ยไว้ครึ่งงวด
ค่าเฉลี่ยของกระแสไซน์ซอยด์ถือเป็นค่าของกระแสตรงที่ประจุไฟฟ้าเดียวกันถูกถ่ายโอนไปมากกว่าครึ่งรอบ เช่นเดียวกับกระแสไซน์ซอยด์:
 ,
,
 ,
,
 /
/
ดังนั้นค่าเฉลี่ยจึงน้อยกว่ามูลค่าที่แท้จริง
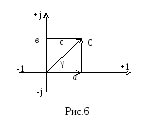
การแสดงปริมาณไซน์ซอยด์ในพิกัดสี่เหลี่ยม
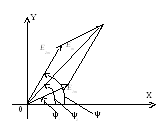
โดยทั่วไปปริมาณไซน์ซอยด์ (รูปที่ 1) สามารถเขียนได้:
อี=อี มบาป(ω ที+ ψ จ)
คุณ=คุณ มบาป(ω ที+ ψ คุณ),
ฉัน=ฉัน มบาป(ω ที+ ψ ฉัน),
ที่ไหน อี คุณ ฉัน- ค่า EMF แรงดันและกระแสทันที
อี ม ,ยู ม ,ฉัน ม - แอมพลิจูดของ EMF แรงดันและกระแส
(ω ที+ ψ จ) - มุมเฟส;
ψ จ , ψ คุณ , ψ ฉัน- ระยะเริ่มต้นของ EMF กระแสและแรงดัน

ในทางปฏิบัติ มีหลายกรณีที่ปริมาณไฟฟ้าอยู่นอกเฟส
จากรูป 1 จะเห็นได้ว่าแรงดันไฟฟ้านำกระแสไปเป็นมุม ψ คุณ -ψ ฉัน- ความแตกต่างในมุมเฟสเรียกว่าความแตกต่างหรือการเลื่อนเฟส
φ=ψ คุณ -ψ ฉัน- ความต่างเฟสระหว่างแรงดันและกระแส
ในกรณีนี้พวกเขาใช้กฎ: ระยะเริ่มต้นที่อยู่ทางด้านซ้ายของจุดกำเนิดมี ค่าบวกและทางขวาเป็นค่าลบ
หากมุม φ >0 แสดงว่ากระแสไฟฟ้าจะล่าช้ากว่าแรงดันไฟฟ้าในเฟส ถ้า φ<0, то ток опережает напряжение по фазе.
เมื่อเพิ่มค่าไซน์ซอยด์สองค่า (ความถี่เดียวกัน) ซึ่งแสดงในพิกัดสี่เหลี่ยมจำเป็นต้องเพิ่มพิกัดสำหรับค่ามุมจำนวนหนึ่ง ω ทีและสร้างไซนูซอยด์รวมจากจุดต่างๆ ซึ่งส่งผลให้เกิดแอมพลิจูดใหม่ การเปลี่ยนเฟสใหม่ และ:
ฉัน ม ≠ ฉัน ม 1 + ฉัน ม 2 ;
φ ฉัน ≠ φ ฉัน 1 + φ ฉัน 2 .
การคำนวณนี้ใช้แรงงานเข้มข้นและขาดความแม่นยำ
ใน 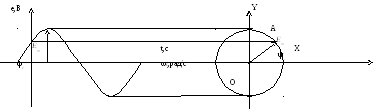 ภาพเวกเตอร์ของปริมาณไซน์ซอยด์
ภาพเวกเตอร์ของปริมาณไซน์ซอยด์
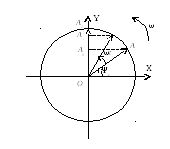
วิธีที่ง่ายที่สุดในการเพิ่มปริมาณไซน์ซอยด์คือการแทนค่าเหล่านั้นเป็นเวกเตอร์ที่หมุนได้ (รูปที่ 3)
ในเครื่องบินที่มีขวาน เกี่ยวกับเอ็กซ์และ เกี่ยวกับย
พิจารณาเวกเตอร์ที่หมุนด้วยความเร็วคงที่เท่ากับความถี่เชิงมุม ω โอเอความยาวซึ่งเท่ากับแอมพลิจูดของ EMF แบบไซน์เช่น  .
.
ค่าแรงเคลื่อนไฟฟ้าทันทีอธิบายโดยความสัมพันธ์ที่ทราบ:
จ= อี มบาป(ω ที+ ψ จ)
ทิศทางการหมุนที่เป็นบวกจะต้องหมุนทวนเข็มนาฬิกา และมุมการหมุนจะวัดจากแกน เกี่ยวกับเอ็กซ์- ในตำแหน่งเริ่มต้น (ที่ ที=0) เวกเตอร์ โอเอหมุนสัมพันธ์กับแกน วัว โดยมุม ψ e
ลองสร้างเส้นโครงเวกเตอร์กัน โอเอต่อแกน โอ้ซึ่งเปลี่ยนเมื่อเวกเตอร์หมุนผ่านมุม ω ทีสัมพันธ์กับตำแหน่งเริ่มต้น ในตำแหน่งเริ่มต้น (ที่ ที=0) การฉายภาพ โอเอ 0 = อี มบาปψ e = จ 0 , เช่น. เท่ากับค่าปัจจุบันของแรงเคลื่อนไฟฟ้าที่ ที=0.
หลังจากผ่านไประยะหนึ่ง ( ที= ที 1) เวกเตอร์ โอเอจะหมุนเป็นมุม ω ที 1 และประกอบกับแกน เกี่ยวกับเอ็กซ์มุม (ω ที 1 + ψ จ) การฉายภาพลงบนแกน โอ้ :
โอเอ 1 = อี มบาป(ω ที 1 + ψ จ)= จ 1 กล่าวคือ เท่ากับค่าปัจจุบันของแรงเคลื่อนไฟฟ้าที่ ที= ที 1 .
ที่ ที= ทีเวกเตอร์ 2 ตัว โอเอตรงกับแกน โอ้และการฉายภาพของมัน โอเอ 2 = อี ม = จ 2. ด้วยการหมุนเวกเตอร์เพิ่มเติม เจเอสซีการฉายภาพลงบนแกน โย่จะเริ่มลดลงแล้วกลายเป็นลบ เป็นต้น
ดังนั้นการฉายภาพลงบนแกน โอ้เวกเตอร์หมุนด้วยความเร็วคงที่ ω และมีความยาวเท่ากับแอมพลิจูดของ EMF เปลี่ยนแปลงตามกฎไซน์ซอยด์ กล่าวคือ แสดงถึงค่าทันทีของ EMF แบบไซน์ ดังนั้นสิ่งที่ตรงกันข้ามก็เป็นจริงเช่นกัน ถ้าเรามีค่าไซน์ซอยด์ จากนั้นจึงสามารถแสดงเป็นเวกเตอร์ที่หมุนได้
กฎสำหรับการสร้างไดอะแกรมเวกเตอร์
ปริมาณใดๆ ที่เปลี่ยนแปลงไปตามไซน์ซอยด์ตามเวลา (EMF, แรงดันไฟ, กระแส) สามารถแสดงเป็นเวกเตอร์ที่กำลังหมุนได้ ซึ่งมีความยาวเท่ากับแอมพลิจูด และความเร็วเชิงมุมเท่ากับความถี่เชิงมุมของปริมาณไซน์ซอยด์นี้
ตำแหน่งเริ่มต้นของเวกเตอร์ที่กำลังหมุนถูกกำหนดโดยมุมเท่ากับเฟสเริ่มต้นของค่าไซน์ซอยด์และแยกจากทิศทางบวกของแกน โอในทิศทางตรงกันข้ามกับการหมุนตามเข็มนาฬิกา
ในแกนเดียวกัน เราสามารถแสดงเวกเตอร์ของแรงเคลื่อนไฟฟ้าทั้งหมดที่กระทำในวงจรที่กำหนด แรงดันไฟฟ้าในทุกส่วนของวงจรที่กำหนด และกระแสในทุกกิ่งของมัน (ในระดับที่กำหนด)
เนื่องจากปริมาณไซน์ซอยด์มีความถี่เท่ากัน เวกเตอร์ที่แทนค่าจะหมุนด้วยความเร็วเท่ากัน ตำแหน่งสัมพัทธ์ของพวกเขาบนเครื่องบินซึ่งสัมพันธ์กันยังคงไม่เปลี่ยนแปลง ดังนั้นในทางปฏิบัติ เวกเตอร์จะไม่ถูกหมุน แต่ถูกสร้างขึ้นโดยสังเกตมุมระหว่างเวกเตอร์ (มุมเฟส)
ด้วยการปฏิเสธที่จะหมุนเวกเตอร์ คุณสามารถสร้างเวกเตอร์ที่ไม่เพียงแต่ค่าสูงสุดเท่านั้น แต่ยังรวมถึงค่าที่มีประสิทธิผลอีกด้วย
สามารถเพิ่มเวกเตอร์ได้ตามกฎสี่เหลี่ยมด้านขนาน ดังนั้นจึงได้เวกเตอร์ทั้งหมด (รูปที่ 4)
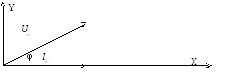
เนื่องจากไม่จำเป็นต้องหมุน เราจึงสนใจเฉพาะตำแหน่งสัมพัทธ์ของเวกเตอร์เท่านั้น ซึ่งหนึ่งในนั้นสามารถสร้างได้ในทิศทางของแกน วัว, เวกเตอร์ที่เหลือจะสัมพันธ์กับเวกเตอร์นี้ (รูปที่ 5)
ตัวอย่างเช่นหากจ่ายแรงดันไฟฟ้ากระแสสลับให้กับองค์ประกอบของวงจรไฟฟ้า คุณ=คุณ ม sin(ωt+ψ u) จากนั้นกระแสสลับจะเกิดขึ้น ฉัน=ฉัน มบาป(ωt-ψ i) ในกรณีนี้ กระแสไฟฟ้าจะล่าช้ากว่าแรงดันไฟฟ้าในเฟสเป็นมุม φ=ψ คุณ -ψ ฉัน- ระยะเริ่มต้น ψ คุณและ ψ ฉันไม่ได้แสดงบนแผนภาพเวกเตอร์ เนื่องจากตำแหน่งสัมพัทธ์ของเวกเตอร์ถูกกำหนดโดยผลต่างเฟส - φ ทั้งหมด เรายอมรับเฟสเริ่มต้นของกระแสเท่ากับศูนย์ (ψ ฉัน=0) จากนั้นเฟสแรงดันไฟฟ้าเริ่มต้น ψ คุณเท่ากับการเปลี่ยนเฟส - φ
บทที่ 4 กระแสสลับเฟสเดียว
§ 48. การได้รับแรงไฟฟ้าแบบแปรผัน
กระแสสลับคือกระแสไฟฟ้าที่มีการเปลี่ยนแปลงขนาดและทิศทางเป็นระยะ
เครื่องกำเนิดไฟฟ้าใช้ในการผลิตไฟฟ้ากระแสสลับ การทำงานของเครื่องกำเนิดไฟฟ้ากระแสสลับจะขึ้นอยู่กับปรากฏการณ์การเหนี่ยวนำแม่เหล็กไฟฟ้า
ลองพิจารณาหลักการทำงานของเครื่องกำเนิดไฟฟ้าและค้นหาวิธีสร้างตัวแปร e โดยใช้วงจรที่ง่ายที่สุด (รูปที่ 46) d.s ภายใต้อิทธิพลของกระแสสลับที่ไหลในวงจรไฟฟ้า
สนามแม่เหล็กของเครื่องกำเนิดไฟฟ้าถูกกระตุ้นโดยแม่เหล็กไฟฟ้าผ่านขดลวดซึ่งกระแสตรงไหลจากแหล่งพลังงานไฟฟ้าภายนอก ลวดทองแดงคอยล์ 3 วางอยู่ในสนามแม่เหล็ก ติดตั้งบนแกน 2 และหมุนไปรอบๆ ด้วยมอเตอร์บางชนิด ปลายเลี้ยวที่ 4 และ 7 เชื่อมต่อกับวงแหวนสลิปทองแดง 6 ซึ่งแยกได้จากแกน แปรงคงที่ 5 ติดอยู่กับวงแหวนซึ่งเชื่อมต่อกับตัวรับพลังงานไฟฟ้า
เป็นที่ทราบกันว่าขนาดของแรงเคลื่อนไฟฟ้าเหนี่ยวนำ กับ. e ที่เกิดขึ้นในตัวนำเมื่อข้ามฟลักซ์แม่เหล็กจะขึ้นอยู่กับการเหนี่ยวนำแม่เหล็ก B ซึ่งเป็นระยะเวลาในการทำงาน ล, ความเร็วและการเคลื่อนที่ของตัวนำในสนามแม่เหล็ก, ไซน์ของมุมระหว่างทิศทางการเคลื่อนที่ของตัวนำกับทิศทางของฟลักซ์แม่เหล็ก:
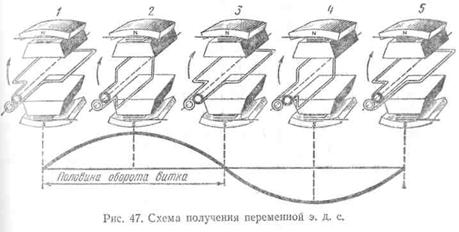
ในรูป ภาพที่ 47 แสดงตำแหน่งต่างๆ ของขดลวดที่หมุนในสนามแม่เหล็กสม่ำเสมอของเครื่องกำเนิดไฟฟ้าด้วยความเร็วสม่ำเสมอ ในตำแหน่งที่ 1 ขดลวดจะเคลื่อนที่ไปตามฟลักซ์แม่เหล็ก ด้วยเหตุนี้ ขดลวดจึงไม่ตัดกับเส้นแม่เหล็ก มุม ά ระหว่างทิศทางการเคลื่อนที่ของตัวนำและฟลักซ์แม่เหล็กจะเป็นศูนย์ ซึ่ง sin 0° = 0 ดังนั้น แรงเคลื่อนไฟฟ้าที่เกิดขึ้นในขดลวด e = บีแอลνบาป 0 0 = 0
ขดลวดที่หมุนเป็นวงกลมหลังจากนั้นสักพักจะหมุนเป็นมุม ά = 90° และเข้ารับตำแหน่ง 2 ในกรณีนี้ มันจะตัดเส้นแม่เหล็กจำนวนมากที่สุด แรงเคลื่อนไฟฟ้าที่เกิดขึ้นจะยิ่งใหญ่ที่สุด sin 90°= 1 และ e= บีแอลνบาป 90°== บีแอลν.
จากตำแหน่งที่ 2 ขดลวดที่หมุนต่อไปจะอยู่ในตำแหน่งที่ 3 และจะตัดกันฟลักซ์แม่เหล็กที่มุม ά = 180° บนเส้นทางที่ 2 ถึง 3 แรงเคลื่อนไฟฟ้าเหนี่ยวนำจะค่อยๆ ลดลง และที่ตำแหน่ง 3 จะกลายเป็นศูนย์ เนื่องจากขดลวดจะไม่ข้ามฟลักซ์แม่เหล็ก บาป 180° = 0 และ จ = บีแอลν- บาป 180°=0
เมื่อใช้กฎมือขวา เราจะกำหนดทิศทางของแรงเคลื่อนไฟฟ้าในขดลวดเมื่อมันเคลื่อนที่ในสนามแม่เหล็กในวงกลมจากตำแหน่งหนึ่งไปอีกตำแหน่งที่ 3 แรงเคลื่อนไฟฟ้าจะพุ่งออกไปจากเราเลยระนาบของภาพวาด ให้เราตกลงที่จะพิจารณาทิศทางนี้จ d.s. เชิงบวก.
จากนั้นขดลวดในขณะที่หมุนจะสลับเข้ารับตำแหน่ง 4, 5 และกลับสู่ตำแหน่งอีกครั้ง 1 - แรงเคลื่อนไฟฟ้าในขดลวดจะค่อยๆ เพิ่มขึ้น และในตำแหน่งที่ 4 แรงเคลื่อนไฟฟ้าจะยิ่งใหญ่ที่สุด (ά = 270°) หลังจากนั้นแรงเคลื่อนไฟฟ้า จะลดลงและในตำแหน่งที่ 5 จะกลายเป็นศูนย์อีกครั้ง
เมื่อใช้กฎมือขวา คุณจะมั่นใจได้ว่าในช่วงครึ่งหลังของการปฏิวัติ แรงเคลื่อนไฟฟ้าที่เกิดขึ้นจะเปลี่ยนทิศทางและจะมุ่งตรงมาหาเรา นี่คือทิศทางของแรงเคลื่อนไฟฟ้า เรามาตกลงกันว่ามันเป็นลบ
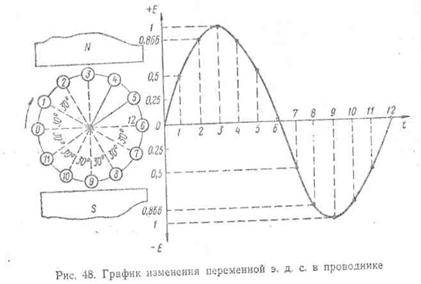
กราฟของการเปลี่ยนแปลงของแรงเคลื่อนไฟฟ้าที่เกิดขึ้นในขดลวดขึ้นอยู่กับมุมของการหมุนในสนามแม่เหล็กจะแสดงในรูปที่ 1 48.
แรงเคลื่อนไฟฟ้า (รูปที่ 48) ซึ่งแปรผันไปตามไซนัสอยด์เรียกว่า ไซน์- ภายใต้อิทธิพลของอีดังกล่าว d.s. กระแสสลับไซน์ซอยด์จะไหลในวงจรไฟฟ้า
แนวคิดพื้นฐานและคำจำกัดความ
มีการใช้กันอย่างแพร่หลายในวงจรไฟฟ้า EMF เป็นระยะ แรงดันและกระแส .
ปริมาณเป็นระยะ การเปลี่ยนแปลงเมื่อเวลาผ่านไปในค่าและทิศทาง และการเปลี่ยนแปลงเหล่านี้จะเกิดขึ้นซ้ำในช่วงเวลาหนึ่ง ต, เรียกว่า ระยะเวลา.
ในทางปฏิบัติ กระแสสลับ (เครื่องกำเนิดไฟฟ้าของโรงไฟฟ้า) ในอุตสาหกรรมส่วนใหญ่สร้าง EMF ที่แตกต่างกันไปตามกฎหมายไซนัสซอยด์
ข้อดีของกฎหมายดังกล่าว:
ก) ความสะดวกในการได้มา;
b) ความตึงเครียดเปลี่ยนได้ง่าย
c) ฟังก์ชั่นไซน์ซอยด์เป็นฟังก์ชั่นเดียวที่ไม่เปลี่ยนรูปร่างในระหว่างกระบวนการรวมและความแตกต่างและในระหว่างกระบวนการส่งและการเปลี่ยนแปลง (ในกระบวนการเปลี่ยนรูป) ของแรงดันไฟฟ้าการพึ่งพาเวลายังคงไม่เปลี่ยนแปลงเช่น ไซน์
ปริมาณตามคาบใดๆ ที่เปลี่ยนแปลงตามกฎไซน์ซอยด์จะมีพารามิเตอร์ลักษณะเฉพาะหลายประการ:
ระยะเวลา - ต[ค];
2) ความถี่ - ฉ[เฮิร์ตซ์]
ส่วนกลับของงวดเรียกว่า ความถี่ :
ความถี่ในการติดตั้งระบบไฟฟ้าทั้งหมดเป็นมาตรฐานอย่างเคร่งครัด:
สำหรับระบบภาคพื้นดิน - 50 (60) Hz;
ในการบิน - 400Hz;
ยานอวกาศ - 1,000Hz
การเพิ่มความถี่ทำให้สามารถลดขนาดการติดตั้งระบบไฟฟ้าได้
3) ความถี่วงจร - ω=2πf.
สำหรับความถี่ 50Hz ความถี่ไซคลิกคือ ω=2*3.14*50=314rad/s หรือ 1/s
4) มูลค่าทันที - มูลค่าของปริมาณที่เปลี่ยนแปลงเป็นระยะ ณ ช่วงเวลาที่พิจารณา
ค่าทันทีแสดงถึง - อี ฉัน คุณ
5) ค่าแอมพลิจูด
ค่าสูงสุดหรือแอมพลิจูดของ EMF แรงดันและกระแสแสดงโดย - อี ม , ยู ม ,ฉัน ม .
6) คุณค่าที่มีประสิทธิภาพ
ค่าประสิทธิผลของ EMF แรงดันและกระแสแสดงโดย - อี ยู ฉัน
ในการหาปริมาณกระแสไซน์ซอยด์ซึ่งเปลี่ยนแปลงอย่างต่อเนื่องและเป็นระยะๆ เมื่อเวลาผ่านไป ให้ใช้ค่ากระแสตรงที่เทียบเท่ากับค่ากระแสสลับสำหรับงานที่ทำ ค่านี้จะเป็น ปัจจุบัน สำหรับกระแสไซน์
ค่าที่มีประสิทธิผล (หรือประสิทธิผล)กระแสไซน์คือค่าของกระแสตรงที่ไหลในตัวต้านทานตัวเดียวกันกับความต้านทาน ร ในช่วงระยะเวลาหนึ่ง ตความร้อนปริมาณเท่ากันจะถูกปล่อยออกมาเช่นเดียวกับระหว่างที่กระแสไซน์ผ่าน
สำหรับกระแสไซน์ซอยด์:
ฉัน=ฉัน มบาปω ที
ปริมาณความร้อนที่เกิดขึ้นในตัวต้านทาน รทันเวลา ตเท่ากับ:
,
และที่กระแสคงที่
.
ตามคำนิยาม ถาม ≈ =ถาม - , แล้ว
,
.
ดังนั้นค่าประสิทธิผลของกระแสไซน์ซอยด์ ฉัน คือค่ากำลังสองเฉลี่ยรากของงวดนั้น ต
ค่าประสิทธิผลของกระแสสลับถูกกำหนดให้เป็นกระแสตรงและเข้า น้อยกว่าแอมพลิจูดของมันหลายเท่า
เช่นเดียวกัน
.
เครื่องมือวัดทางไฟฟ้าส่วนใหญ่ทำงานโดยใช้ผลกระทบทางความร้อนหรือไฟฟ้าไดนามิก ดังนั้นจึงแสดงค่าที่มีประสิทธิภาพเสมอ การคำนวณพื้นฐานของวงจรไฟฟ้าของกระแสไซน์ซอยด์ดำเนินการโดยใช้ค่าที่มีประสิทธิผล สำหรับปริมาณที่ไม่ใช่ไซนูซอยด์ อัตราส่วนเหล่านี้จะแตกต่างออกไป
7) ค่าเฉลี่ย
ค่าเฉลี่ย ค่าไซน์ซอยด์คือค่าเฉลี่ยเลขคณิต อย่างไรก็ตาม หากเรากำหนดค่าเฉลี่ยของค่าไซน์ซอยด์ในช่วงเวลาหนึ่ง ตจากนั้นจะเท่ากับศูนย์ เนื่องจากครึ่งคลื่นบวกและลบของเส้นโค้งไซน์มีรูปร่างตรงกัน ดังนั้นจึงกำหนดค่าเฉลี่ยไว้ครึ่งงวด
ค่าเฉลี่ยของกระแสไซน์ซอยด์ถือเป็นค่าของกระแสตรงที่ประจุไฟฟ้าเดียวกันถูกถ่ายโอนไปมากกว่าครึ่งรอบ เช่นเดียวกับกระแสไซน์ซอยด์:
,
,
/
ดังนั้นค่าเฉลี่ยจึงน้อยกว่ามูลค่าที่แท้จริง
การแสดงปริมาณไซน์ซอยด์ในพิกัดสี่เหลี่ยม
โดยทั่วไปปริมาณไซน์ซอยด์ (รูปที่ 1) สามารถเขียนได้:
อี=อี มบาป(ω ที+ ψ จ)
คุณ=คุณ มบาป(ω ที+ ψ คุณ),
ฉัน=ฉัน มบาป(ω ที+ ψ ฉัน),
ที่ไหน อี คุณ ฉัน- ค่า EMF แรงดันและกระแสทันที
อี ม ,ยู ม ,ฉัน ม - แอมพลิจูดของ EMF แรงดันและกระแส
(ω ที+ ψ จ) - มุมเฟส;
ψ จ , ψ คุณ , ψ ฉัน- ระยะเริ่มต้นของ EMF กระแสและแรงดัน
ในทางปฏิบัติ มีหลายกรณีที่ปริมาณไฟฟ้าอยู่นอกเฟส
จากรูป 1 จะเห็นได้ว่าแรงดันไฟฟ้านำกระแสไปเป็นมุม ψ คุณ -ψ ฉัน- ความแตกต่างในมุมเฟสเรียกว่าความแตกต่างหรือการเลื่อนเฟส
φ=ψ คุณ -ψ ฉัน- ความต่างเฟสระหว่างแรงดันและกระแส
ในกรณีนี้ จะใช้กฎ: เฟสเริ่มต้นที่อยู่ทางด้านซ้ายของจุดเริ่มต้นจะมีค่าเป็นบวก และเฟสทางด้านขวาจะมีค่าเป็นลบ
หากมุม φ >0 แสดงว่ากระแสไฟฟ้าจะล่าช้ากว่าแรงดันไฟฟ้าในเฟส ถ้า φ<0, то ток опережает напряжение по фазе.
เมื่อเพิ่มค่าไซน์ซอยด์สองค่า (ความถี่เดียวกัน) ซึ่งแสดงในพิกัดสี่เหลี่ยมจำเป็นต้องเพิ่มพิกัดสำหรับค่ามุมจำนวนหนึ่ง ω ทีและสร้างไซนูซอยด์รวมจากจุดต่างๆ ซึ่งส่งผลให้เกิดแอมพลิจูดใหม่ การเปลี่ยนเฟสใหม่ และ:
ฉัน ม ≠ ฉัน ม 1 + ฉัน ม 2 ;
φ ฉัน ≠ φ ฉัน 1 + φ ฉัน 2 .
การคำนวณนี้ใช้แรงงานเข้มข้นและขาดความแม่นยำ
ใน ภาพเวกเตอร์ของปริมาณไซน์ซอยด์
วิธีที่ง่ายที่สุดในการเพิ่มปริมาณไซน์ซอยด์คือการแทนค่าเหล่านั้นเป็นเวกเตอร์ที่หมุนได้ (รูปที่ 3)
ในเครื่องบินที่มีขวาน เกี่ยวกับเอ็กซ์และ เกี่ยวกับย
พิจารณาเวกเตอร์ที่หมุนด้วยความเร็วคงที่เท่ากับความถี่เชิงมุม ω โอเอความยาวซึ่งเท่ากับแอมพลิจูดของ EMF แบบไซน์เช่น .
ค่าแรงเคลื่อนไฟฟ้าทันทีอธิบายโดยความสัมพันธ์ที่ทราบ:
จ= อี มบาป(ω ที+ ψ จ)
ทิศทางการหมุนที่เป็นบวกจะต้องหมุนทวนเข็มนาฬิกา และมุมการหมุนจะวัดจากแกน เกี่ยวกับเอ็กซ์- ในตำแหน่งเริ่มต้น (ที่ ที=0) เวกเตอร์ โอเอหมุนสัมพันธ์กับแกน วัว โดยมุม ψ e
ลองสร้างเส้นโครงเวกเตอร์กัน โอเอต่อแกน โอ้ซึ่งเปลี่ยนเมื่อเวกเตอร์หมุนผ่านมุม ω ทีสัมพันธ์กับตำแหน่งเริ่มต้น ในตำแหน่งเริ่มต้น (ที่ ที=0) การฉายภาพ โอเอ 0 = อี มบาปψ e = จ 0 , เช่น. เท่ากับค่าปัจจุบันของแรงเคลื่อนไฟฟ้าที่ ที=0.
หลังจากผ่านไประยะหนึ่ง ( ที= ที 1) เวกเตอร์ โอเอจะหมุนเป็นมุม ω ที 1 และประกอบกับแกน เกี่ยวกับเอ็กซ์มุม (ω ที 1 + ψ จ) การฉายภาพลงบนแกน โอ้ :
โอเอ 1 = อี มบาป(ω ที 1 + ψ จ)= จ 1 กล่าวคือ เท่ากับค่าปัจจุบันของแรงเคลื่อนไฟฟ้าที่ ที= ที 1 .
ที่ ที= ทีเวกเตอร์ 2 ตัว โอเอตรงกับแกน โอ้และการฉายภาพของมัน โอเอ 2 = อี ม = จ 2. ด้วยการหมุนเวกเตอร์เพิ่มเติม เจเอสซีการฉายภาพลงบนแกน โย่จะเริ่มลดลงแล้วกลายเป็นลบ เป็นต้น
ดังนั้นการฉายภาพลงบนแกน โอ้เวกเตอร์หมุนด้วยความเร็วคงที่ ω และมีความยาวเท่ากับแอมพลิจูดของ EMF เปลี่ยนแปลงตามกฎไซน์ซอยด์ กล่าวคือ แสดงถึงค่าทันทีของ EMF แบบไซน์ ดังนั้นสิ่งที่ตรงกันข้ามก็เป็นจริงเช่นกัน ถ้าเรามีค่าไซน์ซอยด์ จากนั้นจึงสามารถแสดงเป็นเวกเตอร์ที่หมุนได้
กฎสำหรับการสร้างไดอะแกรมเวกเตอร์
ปริมาณใดๆ ที่เปลี่ยนแปลงไปตามไซน์ซอยด์ตามเวลา (EMF, แรงดันไฟ, กระแส) สามารถแสดงเป็นเวกเตอร์ที่กำลังหมุนได้ ซึ่งมีความยาวเท่ากับแอมพลิจูด และความเร็วเชิงมุมเท่ากับความถี่เชิงมุมของปริมาณไซน์ซอยด์นี้
ตำแหน่งเริ่มต้นของเวกเตอร์ที่กำลังหมุนถูกกำหนดโดยมุมเท่ากับเฟสเริ่มต้นของค่าไซน์ซอยด์และแยกจากทิศทางบวกของแกน โอในทิศทางตรงกันข้ามกับการหมุนตามเข็มนาฬิกา
ในแกนเดียวกัน เราสามารถแสดงเวกเตอร์ของแรงเคลื่อนไฟฟ้าทั้งหมดที่กระทำในวงจรที่กำหนด แรงดันไฟฟ้าในทุกส่วนของวงจรที่กำหนด และกระแสในทุกกิ่งของมัน (ในระดับที่กำหนด)
เนื่องจากปริมาณไซน์ซอยด์มีความถี่เท่ากัน เวกเตอร์ที่แทนค่าจะหมุนด้วยความเร็วเท่ากัน ตำแหน่งสัมพัทธ์ของพวกเขาบนเครื่องบินซึ่งสัมพันธ์กันยังคงไม่เปลี่ยนแปลง ดังนั้นในทางปฏิบัติ เวกเตอร์จะไม่ถูกหมุน แต่ถูกสร้างขึ้นโดยสังเกตมุมระหว่างเวกเตอร์ (มุมเฟส)
ด้วยการปฏิเสธที่จะหมุนเวกเตอร์ คุณสามารถสร้างเวกเตอร์ที่ไม่เพียงแต่ค่าสูงสุดเท่านั้น แต่ยังรวมถึงค่าที่มีประสิทธิผลอีกด้วย
สามารถเพิ่มเวกเตอร์ได้ตามกฎสี่เหลี่ยมด้านขนาน ดังนั้นจึงได้เวกเตอร์ทั้งหมด (รูปที่ 4)
เนื่องจากไม่จำเป็นต้องหมุน เราจึงสนใจเฉพาะตำแหน่งสัมพัทธ์ของเวกเตอร์เท่านั้น ซึ่งหนึ่งในนั้นสามารถสร้างได้ในทิศทางของแกน วัว, เวกเตอร์ที่เหลือจะสัมพันธ์กับเวกเตอร์นี้ (รูปที่ 5)
ตัวอย่างเช่นหากจ่ายแรงดันไฟฟ้ากระแสสลับให้กับองค์ประกอบของวงจรไฟฟ้า คุณ=คุณ ม sin(ωt+ψ u) จากนั้นกระแสสลับจะเกิดขึ้น ฉัน=ฉัน มบาป(ωt-ψ i) ในกรณีนี้ กระแสไฟฟ้าจะล่าช้ากว่าแรงดันไฟฟ้าในเฟสเป็นมุม φ=ψ คุณ -ψ ฉัน- ระยะเริ่มต้น ψ คุณและ ψ ฉันไม่ได้แสดงบนแผนภาพเวกเตอร์ เนื่องจากตำแหน่งสัมพัทธ์ของเวกเตอร์ถูกกำหนดโดยผลต่างเฟส - φ ทั้งหมด เรายอมรับเฟสเริ่มต้นของกระแสเท่ากับศูนย์ (ψ ฉัน=0) จากนั้นเฟสแรงดันไฟฟ้าเริ่มต้น ψ คุณเท่ากับการเปลี่ยนเฟส - φ
วิธีการคำนวณแบบกราฟิกไม่ถูกต้องอย่างร้ายแรง ในทางปฏิบัติ พวกเขาหันไปใช้วิธีคำนวณทางคณิตศาสตร์ที่แน่นอนตามทฤษฎีจำนวนเชิงซ้อน
แนวคิดเกี่ยวกับจำนวนเชิงซ้อน
ระนาบเชิงซ้อน - ระบบพิกัดสี่เหลี่ยมซึ่งมีการพล็อตจำนวนจริงตามแกนเดียว + 1 อีกด้านหนึ่ง (ตั้งฉาก) - ตัวเลขจินตภาพ + เจ.
ที่นี่ เจ=
![]() -
หน่วยจินตภาพ
-
หน่วยจินตภาพ
การดำเนินการกับหน่วยจินตภาพ:
1)
เจ 2 =-1;
2)
จุดใดๆ บนระนาบเชิงซ้อนสามารถกำหนดลักษณะเฉพาะด้วยจำนวนเชิงซ้อน เรียกได้ว่าเป็นจำนวนเชิงซ้อน กับมีจริง อีกครั้งและจินตนาการ ฉันส่วนประกอบ
รูปแบบพีชคณิตในการเขียนจำนวนเชิงซ้อน:
กับ =ก+เจวี,
ที่ไหน ก=กโคซ่า – ส่วนจริงของจำนวนเชิงซ้อน
วี=กซินา – ส่วนจินตภาพ, γ = อาร์คจี - เฟส
ค=  - โมดูลัสของจำนวนเชิงซ้อน
- โมดูลัสของจำนวนเชิงซ้อน
รูปแบบตรีโกณมิติในการเขียนจำนวนเชิงซ้อน:
กับ =ค(คอสγ+ เจซินγ).
รูปแบบการเขียนเลขชี้กำลังแบบเลขชี้กำลัง:
 , ที่ไหน
, ที่ไหน  - ตัวดำเนินการหมุน (ปัจจัยการหมุน)
- ตัวดำเนินการหมุน (ปัจจัยการหมุน)
คอสγ
+
เจซินγ
=
- สูตรออยเลอร์
กรณีพิเศษ:
สำหรับ γ= π/2  ;
;
γ= -π/2  ;
;
γ= π
 .
.
รูปแบบตรีโกณมิติของสัญกรณ์ใช้ในการเปลี่ยนจากรูปแบบพีชคณิตเป็นรูปแบบเลขชี้กำลังและในทางกลับกัน
ในอุตสาหกรรม พวกเขาใช้กระแสสลับไซน์ซอยด์เป็นหลัก ซึ่งแตกต่างจากกระแสคงที่ตรงที่เปลี่ยนค่าและทิศทางเป็นระยะทุกช่วงเวลา เพื่อให้ได้กระแสไฟฟ้าดังกล่าว จะใช้แหล่งพลังงานไฟฟ้าเพื่อสร้างตัวแปร e ง. มีการเปลี่ยนแปลงขนาดและทิศทางเป็นระยะ แหล่งดังกล่าวเรียกว่าเครื่องกำเนิดไฟฟ้ากระแสสลับ
หลักการรับกระแสสลับเครื่องกำเนิดไฟฟ้ากระแสสลับที่ง่ายที่สุดสามารถเป็นขดลวดที่หมุนในสนามแม่เหล็กสม่ำเสมอ (รูปที่ 168, a) การใช้กฎมือขวาทำให้ง่ายต่อการกำหนดว่าระหว่างการหมุนของขดลวดทิศทางของ e d.s. e เกิดขึ้นในส่วนการทำงานที่ 1 และ 2 ของการเลี้ยวเปลี่ยนแปลงอย่างต่อเนื่อง (แสดงด้วยลูกศร) ดังนั้นทิศทางของกระแส i ที่ผ่านวงจรปิดก็เปลี่ยนไปเช่นกัน
ตามกฎของการเหนี่ยวนำแม่เหล็กไฟฟ้าจ. d. เหนี่ยวนำให้เกิดขดลวดเมื่อหมุนด้วยความเร็วรอบนอก? ในสนามแม่เหล็กที่มีการเหนี่ยวนำ B
2l คือความยาวของส่วนทำงานทั้งสองของขดลวดที่อยู่ในสนามแม่เหล็ก
มุมระหว่างทิศทางของเส้นสนามแม่เหล็กกับทิศทางการเคลื่อนที่ของขดลวด ณ เวลาที่พิจารณา (ทิศทางของเวกเตอร์ความเร็ว?)
เมื่อขดลวดหมุนด้วยความเร็วเชิงมุม? มุม? = ?t ดังนั้น
e = 2lBv บาป?t
มุมแปรผัน? เสื้อถูกเรียกว่า เฟสจ. d.s. มูลค่า 2 ปอนด์ ? แทนค่าสูงสุดของ e d.s. e ซึ่งต้องใช้ที่?t = 90° (เมื่อระนาบของขดลวดตั้งฉากกับเส้นแรงแม่เหล็ก) แสดงถึง E เราได้รับ:
e = ไม่มีบาป?
ผลที่ตามมาของการพึ่งพาการเปลี่ยนแปลงใน e d.s. e จากมุม t หรือจากเวลา t แสดงเป็นภาพด้วยไซนัสอยด์ (รูปที่ 168, b) แรงเคลื่อนไฟฟ้ากระแสและแรงดันไฟฟ้าที่เปลี่ยนค่าและทิศทางตามกฎของไซนัสอยด์เรียกว่า ไซน์- แกนที่วางมุมนั้นอยู่? t ถือได้ว่าเป็นแกนเวลา t
มาดูตำแหน่งคอยล์แต่ละตำแหน่งกัน ณ เวลาที่สอดคล้องกับมุม t 1 (ดูรูปที่ 168, a) เมื่อขดลวดอยู่ในตำแหน่งแนวนอน ส่วนการทำงานของมันดูเหมือนจะเลื่อนไปตามเส้นแรงแม่เหล็กโดยไม่ข้ามมัน ดังนั้นในขณะนี้จ d.s. ไม่ได้ถูกชักนำในตัวพวกเขา (จุดที่ 1 ในรูปที่ 168, b) เมื่อขดลวดหมุนมากขึ้น ด้านข้างจะเริ่มตัดกับเส้นแรงแม่เหล็ก เมื่อมุมการหมุนเพิ่มขึ้น จำนวนเส้นแรงที่ด้านข้างของขดลวดข้ามต่อหนึ่งหน่วยเวลาจะเพิ่มขึ้น และค่า e เหนี่ยวนำในขดลวดจะเพิ่มขึ้นตามไปด้วย ง. กับอี
ในขณะที่เวลาที่สอดคล้องกับมุม t 2 ขดลวดจะข้ามเส้นสนามแม่เหล็กจำนวนมากที่สุด เนื่องจากส่วนการทำงานของมัน 1 และ 2 เคลื่อนที่ตั้งฉากกับเส้นสนามแม่เหล็ก ในขณะนี้อี d.s. e ถึงค่าสูงสุด E t (จุดที่ 2 บนกราฟ) เมื่อขดลวดหมุนมากขึ้น จำนวนเส้นแรงที่ตัดกันจะลดลง และด้วยเหตุนี้ e ที่เกิดขึ้นในขดลวดจึงลดลง d.s. ในขณะที่เวลาที่สอดคล้องกับมุม ส่วนการทำงานของคอยล์ดูเหมือนจะเลื่อนไปตามเส้นแรงแม่เหล็กอีกครั้ง ซึ่งเป็นผลมาจากการที่เช่น d.s. e จะเท่ากับศูนย์ (จุดที่ 3) จากนั้นส่วนการทำงานของเทิร์น 1 และ 2 จะเริ่มข้ามเส้นแรงแม่เหล็กอีกครั้ง แต่ไปในทิศทางที่ต่างออกไป ดังนั้น e จึงปรากฏในเทิร์น d.s. ทิศทางตรงกันข้าม ณ เวลาที่สอดคล้องกับมุม?t 4. ด้วยการจัดเรียงขดลวดในแนวตั้ง e d.s. ถึงค่าสูงสุด - E t (จุดที่ 4) จากนั้นจะลดลงและเมื่อถึงเวลาที่สอดคล้องกับ? t5 มันจะเท่ากับศูนย์อีกครั้ง (จุดที่ 5) พร้อมการเคลื่อนตัวของคอยล์เพิ่มเติมอีกด้วย
การเปลี่ยนแปลงใหม่เกี่ยวกับกระบวนการกระตุ้นเช่นที่อธิบายไว้ข้างต้น d.s. จะถูกทำซ้ำ
ในเครื่องกำเนิดไฟฟ้ากระแสสลับสมัยใหม่ แม่เหล็กหรือแม่เหล็กไฟฟ้าที่สร้างสนามแม่เหล็กมักจะอยู่ที่ส่วนที่หมุนของเครื่อง - โรเตอร์และรอบที่ตัวแปร e ถูกเหนี่ยวนำ d.s. - บนส่วนที่อยู่กับที่ของเครื่องกำเนิดไฟฟ้า - สเตเตอร์- อย่างไรก็ตามจากมุมมองของหลักการทำงานของเครื่องกำเนิดไฟฟ้ากระแสสลับไม่สำคัญว่าส่วนใดของเครื่อง - โรเตอร์หรือสเตเตอร์ - รอบที่ตัวแปร e ถูกเหนี่ยวนำอยู่ d.s.
การทำงานของตัวรับพลังงานไฟฟ้าด้วยไฟฟ้ากระแสสลับหากคุณเชื่อมต่อหลอดไฟฟ้าเข้ากับเครื่องกำเนิดไฟฟ้ากระแสสลับ (ดูรูปที่ 168, a) ไส้หลอดจะร้อนขึ้นและเย็นลงเป็นระยะ อย่างไรก็ตาม หากความถี่ของการเปลี่ยนแปลงของกระแสสลับสูงเพียงพอ ไส้หลอดก็จะไม่มีเวลาให้เย็นลง และดวงตามนุษย์จะไม่ตรวจจับการเปลี่ยนแปลงของความเข้มของแสง เงื่อนไขเดียวกันนี้เกิดขึ้นเมื่อใช้งานมอเตอร์ AC ในระหว่างการทำงานเครื่องยนต์ดังกล่าวจะได้รับพัลส์กระแสสลับจากแหล่งกำเนิดตามมาด้วยความถี่สูงและโรเตอร์จะหมุนด้วยความถี่คงที่