
![]()


ความสามารถของเรา
การปรับสมดุลแบบไดนามิกของโรเตอร์และเพลาแนวตั้งและแนวนอน
การสร้างสมดุลในการสนับสนุนของตนเองที่องค์กรของลูกค้า
การทรงตัวบนเครื่องจักร
การวินิจฉัยสาเหตุที่ทำให้ไม่สมดุล
การระบุสาเหตุของความผิดปกติของอุปกรณ์
ผลการปรับสมดุลอุปกรณ์
ลดการสั่นสะเทือนและเพิ่มภาระ
เพิ่มอายุการใช้งานของตลับลูกปืน ข้อต่อ และซีล
ลดโอกาสที่อุปกรณ์ฉุกเฉินจะล้มเหลว
การลดการใช้ไฟฟ้า
หลังจากการปรับสมดุล ผลลัพธ์ทั้งหมดจะถูกบันทึกไว้ในรูปแบบของเกณฑ์วิธีการปรับสมดุล ซึ่งสะท้อนถึงชื่อของอุปกรณ์ ระดับความแม่นยำ พารามิเตอร์ทางเรขาคณิตช่วงที่ยอมรับได้ รวมถึงระดับความไม่สมดุลเริ่มต้นและสุดท้าย
ขั้นตอนการปรับสมดุล
การวัดการสั่นสะเทือนเบื้องต้น
การติดตั้งตุ้มน้ำหนักทดสอบด้วยมวลที่ทราบ
การวัดการสั่นสะเทือนซ้ำๆ
การคำนวณน้ำหนักแก้ไขและมุมการติดตั้ง การติดตั้งน้ำหนักบนโรเตอร์ (หรือถอดโลหะ)
การวัดแรงสั่นสะเทือนใหม่จนได้ผลลัพธ์
ประโยชน์ของการร่วมงานกับเรา
การพัฒนาและประสบการณ์การวิจัยตั้งแต่ปี 1985
วิศวกรและนักวิทยาศาสตร์ของเราได้พัฒนาและค้นคว้าเกี่ยวกับการวินิจฉัยการสั่นสะเทือนมานานกว่า 30 ปี
ห้องปฏิบัติการทดสอบแบบไม่ทำลายที่ได้รับการรับรอง
ใบรับรองห้องปฏิบัติการ การทดสอบแบบไม่ทำลาย– นี่คือการรับประกันว่าบริษัทมีอุปกรณ์ที่เชื่อถือได้และผู้เชี่ยวชาญมืออาชีพ จากเอกสารนี้ เราสามารถให้คำแนะนำในการซ่อมและบำรุงรักษาเครื่องจักรได้
การวินิจฉัยฟรีและรายงานโดยละเอียด
หลังจากปรับสมดุลแล้ว คุณจะได้รับรายงานโดยละเอียดพร้อมผลลัพธ์ "ก่อน" และ "หลัง" และยังมีคำแนะนำในการซ่อมแซมและดำเนินการเพิ่มเติมอีกด้วย
การผลิตอุปกรณ์ของตัวเอง
ตัวเราเองได้พัฒนาอุปกรณ์วินิจฉัยการสั่นสะเทือนและใช้ในงานของเรา
วิดีโอการปรับสมดุลของเรา:





การปรับสมดุล
ในเครื่องจักรที่มีกลไกการหมุน โรเตอร์และกระดองจะต้องปฏิบัติตามขั้นตอนบังคับ - การปรับสมดุล มันสามารถเป็นแบบคงที่และไดนามิก การปรับสมดุลของเพลาเครื่องยนต์ทำได้โดยใช้อุปกรณ์พิเศษและตรวจพบความไม่สมดุลของกระดอง นี่คือสาเหตุหลักของการตี (การสั่นสะเทือน) บนเพลา การบาลานซ์เพลามอเตอร์ไฟฟ้า
การออกแบบเพลามอเตอร์ไฟฟ้ารวมองค์ประกอบจำนวนมากซึ่งมีการกระจายมวลไม่สม่ำเสมอ สาเหตุของความไม่สม่ำเสมอนี้อาจเป็น:
* ความแตกต่างในด้านมวลของชิ้นส่วน
* ความแตกต่างของความหนาขององค์ประกอบ
* การออกเดินทางของชิ้นส่วนที่คดเคี้ยว;
* ความไม่สมดุลของชิ้นส่วนเนื่องจากความเฉื่อยหรือการกระจัดของแกน
มวลของแต่ละส่วนของเพลาที่ประกอบจะถูกรวมหรือชดเชย โดยทั้งหมดขึ้นอยู่กับตำแหน่งของส่วนประกอบแต่ละชิ้น หากแกนหมุนบนเพลาเบี่ยงเบนไปจากแกนความเฉื่อย เพลาดังกล่าวมักจะเรียกว่าไม่สมดุล เพลาที่มีคุณสมบัตินี้จะทำให้เกิดปรากฏการณ์การสั่นสะเทือนระหว่างการหมุนซึ่งจะส่งผลเสียต่อแบริ่งเครื่องยนต์และฐานของตัวเครื่อง
งานเช่นเพลาปรับสมดุลจะต้องดำเนินการในบริษัทที่เชี่ยวชาญ การบริการจะต้องมีพนักงานของช่างฝีมือที่มีคุณสมบัติสูงซึ่งสามารถทำงานนี้ให้สำเร็จได้อย่างรวดเร็วและมีประสิทธิภาพ นี่คือบริษัทประเภทที่ทีมของเราเป็นจริงๆ! เรามีประสบการณ์มากมายและเชี่ยวชาญด้านมอเตอร์ไฟฟ้าทุกยี่ห้อและทุกรุ่น หากคุณต้องการปรับสมดุลเพลามอเตอร์ไฟฟ้า เราจะดำเนินการนี้โดยใช้อุปกรณ์ปรับสมดุลที่ทันสมัยที่สุด กดหมายเลขโทรศัพท์ที่แสดงบนเว็บไซต์ แล้วผู้เชี่ยวชาญของเราจะติดต่อคุณและแก้ไขปัญหาเรื่องความสมดุลทั้งหมด
จดจำ! การปรับสมดุลเพลาที่ดำเนินการอย่างถูกต้องเป็นกุญแจสำคัญในการทำงานอุปกรณ์ของคุณอย่างต่อเนื่อง!
ปรับสมดุลการระบายอากาศของมอเตอร์ไฟฟ้า
การปรับสมดุลแบบไดนามิกของระบบระบายอากาศของมอเตอร์เป็นหนึ่งในการดำเนินการหลายอย่างเพื่อให้แน่ใจว่ากลไกการหมุนทำงานได้อย่างราบรื่นอย่างต่อเนื่อง การปรับสมดุลดังกล่าวทำได้บนเครื่องปรับสมดุลแบบพิเศษหรือบนแท่นยึดของเครื่องยนต์
เหตุใดจึงมีการปรับสมดุลการระบายอากาศ?
กลไกการหมุนทั้งหมดรวมถึงองค์ประกอบแต่ละส่วนจะต้องมีความสมดุล ในกรณีที่การทรงตัวไม่ดี เครื่องยนต์อาจเริ่มสั่น มีเสียงดัง สูญเสียกำลัง และสิ้นเปลืองพลังงานหรือเชื้อเพลิงมากขึ้น สิ่งนี้นำไปสู่ความล้มเหลวของแต่ละส่วนของมอเตอร์ไฟฟ้าหรือทั้งหมด
เมื่อความไม่สมดุล (การกระจัดของแกนหมุน) หรืออีกนัยหนึ่งคือความไม่สมดุลเกิดขึ้นในระบบที่กำลังหมุน ปัญหาจะเกิดขึ้นทันทีเนื่องจากการสั่นสะเทือนที่เพิ่มขึ้น ยิ่งความเร็วในการหมุนสูงเท่าไร ความไม่สมดุลก็จะยิ่งชัดเจนมากขึ้นเท่านั้น
บริษัทของเราให้บริการ “ปรับสมดุลระบบระบายอากาศ”! เรามีผู้เชี่ยวชาญที่มีคุณสมบัติสูงเท่านั้นในพนักงานของเราที่สามารถทำงานนี้ให้เสร็จสิ้นได้อย่างรวดเร็วและมีประสิทธิภาพ
หากคุณต้องการจ่ายค่าซ่อมมอเตอร์ไฟฟ้าให้น้อยที่สุดคุณต้องปฏิบัติตามกฎการทำงานของอุปกรณ์เหล่านี้:
* ต้องปรับสมดุลการระบายอากาศด้วยมอเตอร์ไฟฟ้าให้ทันเวลา
* ตรวจสอบความสามารถในการให้บริการของอุปกรณ์อย่างต่อเนื่อง
* ต้องใช้มอเตอร์ไฟฟ้าด้วยพารามิเตอร์ที่สอดคล้องกับเอกสารข้อมูลทางเทคนิคของตัวเครื่อง
* ปรากฏการณ์การสั่นสะเทือนที่เพิ่มขึ้นทำให้เกิดภาระเพิ่มเติมในเครื่องยนต์ทั้งหมดหรือแต่ละชิ้นส่วน
หากคุณต้องการปรับสมดุลของระบบระบายอากาศด้วยมอเตอร์ไฟฟ้า ให้กดหมายเลขโทรศัพท์ที่ระบุไว้ในเว็บไซต์ของเรา เราจะทำงานนี้ให้เสร็จสิ้นอย่างมีประสิทธิภาพและตรงเวลา และเครื่องยนต์หลังจากปรับสมดุลการระบายอากาศแล้ว ก็จะทำงานได้อย่างถูกต้องเป็นเวลาหลายปี!





การปรับสมดุลโรเตอร์ของมอเตอร์ไฟฟ้า
หากชิ้นส่วนของเครื่องที่มีชิ้นส่วนหมุนไม่สมดุลก็มีโอกาสที่เครื่องจะเริ่มสั่น ตัวอย่างเช่น การสั่นสะเทือนของโรเตอร์อาจทำให้อุปกรณ์ทั้งหมดหรือองค์ประกอบแต่ละส่วนเสียหายได้ เพื่อให้เครื่องยนต์ทำงานได้อย่างมีเสถียรภาพและเหมาะสม จำเป็นต้องมีการปรับสมดุลของโรเตอร์
บริษัทของเรานำเสนอบริการ “การปรับสมดุลโรเตอร์บนเครื่องจักรในมอสโก” เราดำเนินงานนี้อย่างมีประสิทธิภาพและรวดเร็ว หลังจากปรับสมดุลโรเตอร์แล้ว มอเตอร์ไฟฟ้าจะทำงานโดยไม่มีข้อผิดพลาดเป็นเวลานาน
งานมีสองประเภทในทิศทางนี้: คงที่และ การปรับสมดุลแบบไดนามิกโรเตอร์ การปรับสมดุลแบบคงที่จะดำเนินการบนปริซึม ในขณะที่การปรับสมดุลแบบไดนามิกจะดำเนินการบนเพลาที่กำลังหมุน ไม่ว่าในกรณีใด คุณต้องมีช่างฝีมือที่มีความเป็นมืออาชีพและมีประสบการณ์สูงซึ่งจะทำงานตามกฎเกณฑ์ทั้งหมด จำเป็นต้องมีอุปกรณ์พิเศษ (เครื่องจักร) ด้วย
ก่อนที่จะเริ่มการปรับสมดุลไดนามิกของโรเตอร์มอเตอร์ไฟฟ้า จะมีการตรวจสอบพื้นผิวและชิ้นส่วนว่าไม่มีการสั่นสะเทือนหรือไม่ หากตรวจพบปรากฏการณ์ดังกล่าว ผู้เชี่ยวชาญจะกำจัดปรากฏการณ์ดังกล่าวก่อน ตามกฎแล้วจะต้องไม่มีชิ้นส่วนที่หลวมบนเพลาจึงจะทำการทรงตัวคุณภาพสูงได้ ถัดไป เพลามอเตอร์ไฟฟ้าจะถูกวางไว้ในแบริ่งของเครื่องจักร และชิ้นส่วนที่ถูกปรับสมดุลจะถูกขับเคลื่อนให้หมุน
ไม่มีประโยชน์ที่จะอธิบายขั้นตอนทั้งหมดโดยละเอียด เนื่องจากเป็นงานที่มีความรับผิดชอบและใช้เวลานาน การปรับสมดุลโรเตอร์ด้วยตัวเองนั้นเป็นปัญหามาก เพื่อปรับสมดุลโรเตอร์ของเครื่องยนต์ คุณต้องมีเครื่องจักรพิเศษ และที่สำคัญที่สุดคือมีความรู้ที่ครอบคลุมเกี่ยวกับกฎเกณฑ์ในการทรงตัวและประสบการณ์ที่กว้างขวางในการดำเนินงานนี้ ดังนั้นในสถานการณ์ที่จำเป็นต้องปรับสมดุลของโรเตอร์ของมอเตอร์ไฟฟ้า เราขอแนะนำให้คุณติดต่อบริษัทที่เชี่ยวชาญ
คุณจำเป็นต้องปรับสมดุลโรเตอร์ของเครื่องยนต์หรือไม่? กดหมายเลขโทรศัพท์ของเราที่ระบุไว้บนเว็บไซต์ แล้วเราจะทำงานทั้งหมดอย่างรวดเร็วและมีประสิทธิภาพ และช่วยให้มอเตอร์ไฟฟ้ามีอายุการใช้งานยาวนาน!




ปรับสมดุลพัดลมมอเตอร์ไฟฟ้า
เมื่อวินิจฉัยการสั่นสะเทือนของพัดลมเครื่องยนต์ และตรวจพบการเต้นที่เพิ่มขึ้น อาจเป็นผลจากปัจจัยหลายประการ:
* ความผิดปกติในการมีเพศสัมพันธ์ครึ่งหนึ่ง;
* ข้อบกพร่องในแบริ่งใบพัด
* ข้อบกพร่องในฐานรากและโครงฐานราก
* การยึดองค์ประกอบแต่ละอย่างอ่อนแอ
* ความไม่สมดุลของใบพัด
* แกนมอเตอร์และพัดลมไม่ตรงกัน
* ความไม่สมดุลของเพลามอเตอร์และปรากฏการณ์อื่นๆ
ดังที่เราเห็น มีเหตุผลบางประการที่ทำให้เกิดการสั่นสะเทือน เป็นที่ทราบกันดีอยู่แล้วว่าปัญหาที่พบบ่อยที่สุดที่ทำให้เกิดการตีคือองค์ประกอบของพัดลมที่ไม่สมดุล เพื่อขจัดปัญหาดังกล่าว ใบพัดพัดลมและใบพัดลมจึงมีความสมดุล
พัดลมที่ไม่สมดุลอาจทำให้เกิดปัญหาต่อไปนี้:
* ประสิทธิภาพลดลง;
* การเกิดเสียงรบกวน
* การผลิตตลับลูกปืนอย่างรวดเร็ว
* การสึกหรอของข้อต่อและซีลนิ้ว
* การปรากฏตัวของข้อบกพร่องในรากฐานและอื่น ๆ
นอกเหนือจากขั้นตอนการปรับสมดุลที่กล่าวข้างต้นแล้ว การปรับสมดุลใบพัดพัดลมยังดำเนินการเพื่อขจัดสัญญาณการสั่นสะเทือนและรับประกันการทำงานของเครื่องยนต์ที่ราบรื่น
บริษัทของเราดำเนินการปรับสมดุลใบพัดพัดลมอย่างมีประสิทธิภาพและรวดเร็ว หากต้องการสั่งบริการเพียงกดหมายเลขโทรศัพท์ที่ระบุไว้ในเว็บไซต์ของเรา ผู้เชี่ยวชาญที่มีคุณสมบัติสูงของเราจะติดต่อคุณและให้คำแนะนำในทุกปัญหา รวมถึงปัญหาที่เกี่ยวข้องกับการปรับสมดุลใบพัดลม
ด้วยการปรับสมดุลพัดลมมอเตอร์ไฟฟ้าอย่างเต็มที่ คุณจะทำงานได้ยาวนานและไม่สะดุด และยังประหยัดเงินในการซ่อมแซมในอนาคตด้วย!




การปรับสมดุลรอกมอเตอร์ไฟฟ้า
ในการส่งการเคลื่อนที่แบบหมุนจะใช้วิธีการที่ได้รับการพิสูจน์มายาวนาน - การส่งผ่านโดยใช้สายพาน มีการใช้กันอย่างแพร่หลายในหลายหน่วยและกลไกต่างๆ จุดสำคัญในการให้บริการระบบส่งกำลังประเภทนี้ไม่เพียงแต่การจัดตำแหน่งเท่านั้น แต่ยังรวมถึงการปรับสมดุลของรอกของมอเตอร์ไฟฟ้าด้วย โดยรอกแต่ละตัวแยกจากกัน
คุณสามารถปรับสมดุลรอกได้โดยใช้วิธีปรับสมดุลแบบคงที่ เนื่องจากรอกเป็นเพียงโรเตอร์บางประเภทเท่านั้น เนื่องจากรูปร่างของรอก ความไม่สมดุลของสถิตจึงมีบทบาทอย่างมาก
บางครั้ง เมื่อความเร็วในการหมุนของรอกสูงเพียงพอ ก็จำเป็นต้องมีการปรับสมดุลแบบไดนามิกด้วย ซึ่งดำเนินการในระนาบแก้ไขเดียว ไม่รวมรอกที่มีหลายร่อง มู่เล่ย์แบบหลายริบมีความสมดุลใน 2 ระนาบ มีเพียงผู้เชี่ยวชาญด้านการปรับสมดุลเท่านั้นที่สามารถกำหนดได้ว่าต้องดำเนินการปรับสมดุลใด
คุณสามารถปรับสมดุลรอกได้ด้วยตัวเอง แต่ต้องใช้ประสบการณ์และทักษะบางอย่างตลอดจนความพร้อมของอุปกรณ์พิเศษ ดังนั้นจึงมีเหตุผลมากกว่าที่จะทำการปรับสมดุลในบริษัทเฉพาะทางซึ่งมีผู้เชี่ยวชาญที่มีคุณสมบัติเหมาะสมอยู่ในพนักงาน ผู้เชี่ยวชาญด้านบริการนี้จะดำเนินการปรับสมดุลรอกอย่างมีประสิทธิภาพและรวดเร็ว นอกจากนี้ลูกค้าจะได้รับการรับประกันสำหรับงานที่ทำ
บริษัทของเราให้บริการคุณภาพสูง “การปรับสมดุลรอกมอเตอร์ไฟฟ้า” งานนี้ดำเนินการโดยช่างฝีมือผู้มีประสบการณ์ หลังจากปรับสมดุลแล้วเครื่องยนต์จะทำงานได้นานและราบรื่น กดหมายเลขโทรศัพท์ที่ระบุไว้บนเว็บไซต์ของเรา! เราจะติดต่อคุณ ให้คำแนะนำในทุกประเด็นที่เกี่ยวข้องกับการทรงตัวมู่เล่ย์ และจะสามารถทำงานนี้ได้อย่างมีประสิทธิภาพ!





ปรับสมดุลชิ้นส่วนที่หมุน
องค์กรของเรามีส่วนร่วมในการปรับสมดุลแบบไดนามิกของระบบระบายอากาศ เกราะมอเตอร์ไฟฟ้า รอก เพลา ใบพัด และชิ้นส่วนที่หมุนอื่นๆ ทั้งบนส่วนรองรับและบนเครื่องปรับสมดุล
เหตุใดจึงต้องมีความสมดุล?
การปรับสมดุล - คำพื้นเมืองทั้งสำหรับรถยนต์และอุปกรณ์อื่นๆที่มีชิ้นส่วนหมุนได้ ชิ้นส่วนที่หมุนได้ทั้งหมดอยู่ภายใต้การดำเนินการนี้ มู่เล่ เพลาข้อเหวี่ยง คลัตช์ เพลาขับ ล้อ รอก พัดลม ฯลฯ เป็นไปไม่ได้ที่จะแสดงรายการทุกอย่าง และถ้าคุณโกงที่นี่ความไม่สมดุลจะปรากฏขึ้นทันทีด้วยการสั่นที่เหนื่อยล้าของวิญญาณ, การสั่นสะเทือน, เสียง, การสึกหรอของแบริ่งอย่างรวดเร็ว, การสูญเสียพลังงาน, การใช้ไฟฟ้าที่เพิ่มขึ้นหรือการใช้เชื้อเพลิง ฯลฯ ซึ่งนำไปสู่การสึกหรอก่อนวัยและความล้มเหลวของสิ่งอื่น ๆ ชิ้นส่วนและในบางกรณีและอุปกรณ์ทั้งหมด
ความไม่สมดุลเกิดขึ้นหากระบบหมุนไม่สมมาตรแม้แต่น้อย ทันทีที่คุณเปลี่ยนแกนการหมุนเล็กน้อยจากศูนย์กลางของชิ้นส่วนหรือทำให้ชิ้นส่วนนี้มีขนาดไม่กลมเป็นเศษส่วนของมิลลิเมตร (หรือความหนาแน่นไม่สม่ำเสมอ) - ความไม่สมดุลจากการสั่น การสั่นสะเทือน และการสึกหรอที่เกิดขึ้น ตรงนั้น อย่างไรก็ตาม มันแสดงออกมาด้วยความเร็วการหมุนที่เพิ่มขึ้น ตัวอย่างเช่น: ที่ความเร็ว 100 กม./ชม. และความไม่สมดุล 15-20 กรัมบนล้อขนาด 14 นิ้ว น้ำหนักบรรทุกบนจานจะคล้ายกับการกระแทกด้วยค้อนขนาด 3 กิโลกรัมในช่วงเวลา 800 ครั้งต่อนาที .
และแล้วก็ได้ข้อสรุป!
1. หากคุณต้องการจ่ายค่าซ่อมน้อยลงเรื่อยๆ ให้ปฏิบัติตามกฎการใช้งานอุปกรณ์อุตสาหกรรม ปรับสมดุลให้ตรงเวลา
2. อุปกรณ์ต้องอยู่ในสภาพการทำงานที่ดีและพารามิเตอร์การทำงานของอุปกรณ์ต้องเป็นไปตามเอกสารข้อมูลทางเทคนิค ส่วนประกอบของเครื่องจักรที่กำลังหมุน (เพลา รอก พัดลม ฯลฯ) จะต้องได้รับการปรับสมดุลทั้งแบบแยกส่วนและแบบประกอบ
3. การสั่นสะเทือนของชิ้นส่วนทำให้เกิดภาระเพิ่มเติมกับชิ้นส่วนและชิ้นส่วนที่เกี่ยวข้อง
GOST 12.2.003-91 SSBT อุปกรณ์การผลิต ข้อกำหนดทั่วไปความปลอดภัย
1.1. อุปกรณ์การผลิตจะต้องมั่นใจในความปลอดภัยของคนงานในระหว่างการติดตั้ง (การรื้อถอน) การทดสอบการใช้งานและการดำเนินงานทั้งในกรณีของการใช้งานอัตโนมัติและเป็นส่วนหนึ่งของความซับซ้อนทางเทคโนโลยีภายใต้ข้อกำหนด (เงื่อนไขกฎ) ที่กำหนดโดยเอกสารการปฏิบัติงาน
บันทึก. โดยทั่วไปการดำเนินการจะรวมถึงการใช้งานตามวัตถุประสงค์ การซ่อมบำรุงและการซ่อมแซม การขนส่ง และการเก็บรักษา
2.1.2. การออกแบบอุปกรณ์การผลิตจะต้องยกเว้นภาระบนชิ้นส่วนและชุดประกอบที่อาจทำให้เกิดการทำลายซึ่งเป็นอันตรายต่อคนงานในทุกโหมดการทำงานที่ต้องการ
2.1.11. การออกแบบอุปกรณ์การผลิตที่ขับเคลื่อนด้วย พลังงานไฟฟ้าจะต้องมีอุปกรณ์ (วิธีการ) เพื่อความปลอดภัยทางไฟฟ้า
2.1.13. อุปกรณ์การผลิตที่เป็นแหล่งกำเนิดเสียงอัลตราซาวนด์และการสั่นสะเทือนต้องได้รับการออกแบบเพื่อให้เสียงอัลตราซาวนด์และการสั่นสะเทือนภายใต้สภาวะและโหมดการทำงานที่ต้องการไม่เกินระดับที่อนุญาตที่กำหนดโดยมาตรฐาน
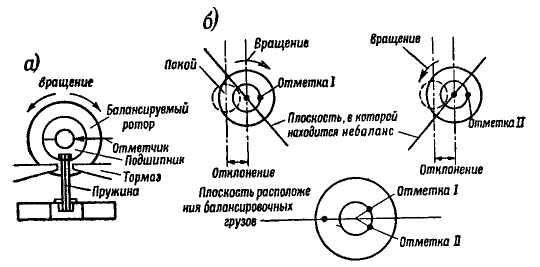
โรเตอร์โดยรวมอาจมีการกระจายน้ำหนักโลหะไม่สม่ำเสมอเมื่อเทียบกับแกนการหมุนและจุดศูนย์ถ่วงจะไม่อยู่บนแกนนี้เช่น น้ำหนักของโรเตอร์จะไม่สมดุลกับแกนหมุน ความไม่สมดุลของโรเตอร์หรือชิ้นส่วนดังกล่าวเรียกว่า ความไม่สมดุล.
เมื่อโรเตอร์หมุน ความไม่สมดุลจะทำให้เกิดแรงรบกวนที่มีทิศทางในแนวรัศมี แรงนี้มีแนวโน้มที่จะฉีกเพลาพร้อมกับส่วนที่ติดอยู่จากแบริ่ง แรงรบกวนเปลี่ยนทิศทางตลอดเวลา โดยเหลือรัศมี ดังนั้นผลกระทบต่อตลับลูกปืนจึงแปรผันไปในทิศทาง การกระทำดังกล่าวย่อมนำไปสู่การสั่นสะเทือนของกลไกอย่างหลีกเลี่ยงไม่ได้
เมื่อสั่นสะเทือน ชิ้นส่วนของกลไกจะประสบกับแรงกระแทก การกระแทก และการโอเวอร์โหลด ซึ่งทำให้เกิดการสึกหรอทั่วไปแบบเร่ง การหยุดชะงักของศูนย์กลางและการยึด และส่งผลให้การสั่นสะเทือนเพิ่มมากขึ้น
เพื่อกำจัดแรงรบกวน โรเตอร์จึงมีความสมดุลเช่น ขจัดความไม่สมดุลของมัน การดำเนินการเพื่อขจัดความไม่สมดุลเรียกว่า สมดุลคุณสามารถปรับสมดุลแต่ละส่วนของโรเตอร์แยกกันหรือทั้งโรเตอร์โดยรวมก็ได้ วิธีหลังประหยัดกว่าและแม่นยำกว่า
เพื่อปรับสมดุลความไม่สมดุลของโรเตอร์ จำเป็นต้องหลอม (แขวน) ภาระของมวลที่จำเป็นสำหรับการปรับสมดุลที่ระยะห่างจากแกนเท่ากัน (ซึ่งตรวจพบความไม่สมดุล) แต่อยู่ในทิศทางตรงกันข้ามกับเส้นทแยงมุม หลังจากนั้นโรเตอร์จะสมดุลและไม่มีแรงรบกวนเกิดขึ้นระหว่างการหมุน
ขนาดและตำแหน่งของความไม่สมดุลจะพบได้เมื่อดำเนินการ ประเภทต่างๆสมดุล
แยกแยะ คงที่และ พลวัตการปรับสมดุลของโรเตอร์:
1. คงที่เรียกว่าการปรับสมดุลเนื่องจากไม่จำเป็นต้องหมุนโรเตอร์เพื่อระบุและกำจัดความไม่สมดุล การปรับสมดุลจะเกิดขึ้นได้เมื่อโรเตอร์อยู่นิ่ง
2. ความไม่สมดุลแบบไดนามิกจะสังเกตได้เมื่อมวลโรเตอร์ที่ไม่สมดุลทำให้เกิดแรงรบกวนสองแรงซึ่งมีขนาดเท่ากัน แต่มีทิศทางตรงกันข้ามและอยู่ที่ปลายต่างกัน ในกรณีนี้อาจกลายเป็นว่าจุดศูนย์ถ่วงทั่วไปของโรเตอร์นั้นอยู่บนแกนหมุนนั่นคือ โรเตอร์มีความสมดุลแบบคงที่ ความไม่สมดุลดังกล่าวสามารถตรวจพบได้เฉพาะเมื่อโรเตอร์หมุนเท่านั้น เนื่องจากจุดศูนย์ถ่วงทั่วไปของโรเตอร์ตั้งอยู่บนแกนของมัน และเฉพาะในระหว่างการหมุนเท่านั้นที่มวลที่ไม่สมดุลทั้งสองจะก่อให้เกิดแรงรบกวนคู่หนึ่งที่มีทิศทางสลับกัน ด้วยเหตุนี้ โรเตอร์ที่มีความสมดุลแบบคงที่อาจไม่สมดุลแบบไดนามิกในบางกรณี การดำเนินการเพื่อระบุและกำจัดความไม่สมดุลแบบไดนามิกเรียกว่า การปรับสมดุลแบบไดนามิก.
การติดตั้งเครื่องดูดควัน
เครื่องดูดควัน (D) ได้รับการออกแบบมาเพื่อดูดก๊าซไอเสียจากเตาหม้อไอน้ำและขับออกมาภายใต้ความกดดัน ปล่องไฟสู่ชั้นบรรยากาศ
เครื่องดูดควันเป็นแบบแรงเหวี่ยง (1) และแบบแนวแกน (2)
1. สำหรับหม้อไอน้ำที่มีความจุไอน้ำ 420-640 ตันต่อชั่วโมง จะใช้เครื่องดูดควันแบบแรงเหวี่ยงชนิดดูดคู่: D-25x2Sh และ D 21.5x2
เครื่องดูดควันเหล่านี้ประกอบด้วยส่วนประกอบหลักดังต่อไปนี้:
ตลับลูกปืน
ใบพัดนำทางและตัวขับเคลื่อน
การติดตั้งเครื่องดูดควันเริ่มต้นด้วยการรับฐานรากและติดตั้งมอเตอร์ไฟฟ้าไว้
ขนาดที่สำคัญ D ของการดูดสองด้านจะกำหนดการจัดส่งล่วงหน้าสำหรับการติดตั้งในรูปแบบที่แยกชิ้นส่วน ดังนั้น การดำเนินการติดตั้งเบื้องต้นคือการประกอบโครงสร้างรองรับ D (เฟรม) และตัวโครงรูปก้นหอยพร้อมช่องดูดบนไซต์ประกอบ
การติดตั้ง D เริ่มต้นด้วยการติดตั้งโครงรองรับซึ่งยึดกับฐานด้วยสลักเกลียว ติดตั้งเฟรมบนแผ่นโลหะซึ่งมีความหนารวมสูงสุด 25-30 มม. โดยจำนวนแผ่นในหนึ่งแพ็คเกจไม่เกินสามแผ่น
แผ่นอิเล็กโทรดตั้งอยู่ทั้งสองด้านของสลักเกลียวฐานรากแต่ละอันและควบคุมเครื่องหมายความสูงซึ่งอนุญาตให้เบี่ยงเบนจากการออกแบบได้ไม่เกิน + - 6 มม.
แบริ่ง D ได้รับการติดตั้งบนโครงรองรับซึ่งมีการจัดตำแหน่งตามแนวสายและลูกดิ่ง
หลังจากติดตั้งตัวเรือนแบริ่งแล้ว ตัวเรือน D จะถูกติดตั้งบนฐาน จากนั้นจึงวางโรเตอร์
หลังจากติดตั้งตัวเรือน D แล้ว ประตูควบคุมจะถูกติดตั้งที่ด้านดูด วาล์วประตูจะต้องได้รับการตรวจสอบก่อน ในระหว่างนั้นจะมีการตรวจสอบความเรียบของการเปิดและปิด
D ที่ประกอบแล้วได้รับการทดสอบขณะไม่ได้ใช้งาน ในกรณีนี้ การเบี่ยงเบนหนีศูนย์ในแนวรัศมีและแนวแกนของใบพัดจะต้องไม่เกิน 3 และ 6 มม. ตามลำดับ
2. ในโรงงานหม้อไอน้ำที่มีความจุไอน้ำ 950 ตัน/ชม. ขึ้นไป จะใช้แนวแกน D ประเภท DO - 31.5 ข้อได้เปรียบหลักของ D เหล่านี้ (เมื่อเทียบกับ D แบบแรงเหวี่ยง) คือความกะทัดรัด แกน D สองขั้นตอนประกอบด้วย:
กระเป๋าดูด
เรือน
ใบพัดนำทาง
ใบพัด
ดิฟฟิวเซอร์
แชสซี
สถานีปั้มน้ำมันพร้อมระบบท่อส่งน้ำมัน
การระบายอากาศเพื่อความเย็น
ช่องดูดประกอบด้วยสองซีก (บนและล่าง) เชื่อมต่อกันด้วยหน้าแปลน มวลรวมของช่องดูดคือประมาณ 7.5 ตัน ติดตั้งบนฐานรองรับสองตัว
ตัวเรือน D ประกอบด้วยสามส่วนที่ออกแบบมาเพื่อรองรับ:
ฉัน. ใบพัดนำทางและใบพัดขั้นที่ 1
ครั้งที่สอง ใบพัดนำทางและใบพัดขั้นที่สอง
สาม เครื่องยืดผม
ชิ้นส่วนทั้งหมดเชื่อมต่อกันบนหน้าแปลนด้วยสลักเกลียว
แชสซีประกอบด้วยเพลา แบริ่งสองตัว และเพลาเชื่อมต่อข้อต่อ D เข้ากับมอเตอร์ไฟฟ้า
ตลับลูกปืน D - ประเภทลูกกลิ้ง ทรงกลม ปรับแนวได้เอง ทำงานบนน้ำมันหล่อลื่นเหลวซึ่งจัดหาโดยสถานีน้ำมันผ่านระบบหล่อลื่นน้ำมัน (ติดตั้งสถานีน้ำมันหนึ่งแห่งบน Ds สองอัน การป้องกันความร้อนของแบริ่งรองรับที่ติดตั้งในตัวกระจายแสง ดำเนินการโดยใช้พัดลมพิเศษและการเคลือบฉนวนกันเสียงความร้อน
การติดตั้ง D เริ่มต้นด้วยการติดตั้งโครงสร้างรองรับและการยอมรับฐานราก พื้นผิวคอนกรีตได้รับการทำความสะอาดเบื้องต้นให้มีความไม่สม่ำเสมอและทำรอยบากที่ตำแหน่งของสลักเกลียวและแผ่นรองฐานรากสำหรับโครงสร้างรองรับ D. แผ่นรองพื้นทำจาก เหล็กแผ่นกว้างและยาว 100-200 มม. สอดคล้องกับความกว้างของระนาบส่วนล่างของโครงสร้างรองรับ จำนวนแผ่นอิเล็กโทรดไม่ควรเกินสามแผ่นในที่เดียว
ลำดับการติดตั้งเทคโนโลยี ____ เครื่องดูดควันตามแนวแกน DO - 31.5
| ลำดับ | ปม | งานหลัก |
| ฉัน | ร่างกายส่วนล่าง | การติดตั้งบนโครงสร้างรองรับ การติดตั้งกุญแจหยุดตามยาว การจัดตำแหน่งช่องว่างความร้อนในจุดยึดรองรับ |
| แบริ่งแรงขับ | การติดตั้งและยึดบนฐานราก โครงสร้างรองรับแบริ่งแรงขับและโรเตอร์ รักษาระยะห่างตามแนวแกน | |
| มอเตอร์ไฟฟ้า | การติดตั้งเพลาครึ่งคลัป การติดตั้งเฟรมและมอเตอร์ไฟฟ้า | |
| โหนด 1,2,3 | การจัดตำแหน่งแกนหลักและเครื่องหมายยกของส่วนล่างของตัวถัง แชสซี และมอเตอร์ไฟฟ้า | |
| แชสซี | จัดส่วนล่างของตัวเรือนให้ตรงกับโรเตอร์โดยยังคงรักษาระยะห่างในแนวรัศมี | |
| รองรับตัวพัดลมดูดอากาศ | การเทคอนกรีตสำหรับสลักเกลียวฐานรากของตัวรองรับตัวเรือน | |
| ชานชาลาและบันได | การติดตั้งตัวขับใบพัดนำทางบนฐานราก การติดตั้งแท่นและบันไดรอบมอเตอร์ไฟฟ้าและตัวเรือนพัดลมดูดอากาศ | |
| ด้านล่างของช่องดูด | การถอดโรเตอร์เครื่องดูดควัน การติดตั้งภายใต้ | |
| อัตรารากฐาน หล่อลื่นพื้นผิวรองรับของขาตั้งด้วยส่วนผสมของจาระบีและกราไฟท์ การติดตั้งส่วนล่างของช่องดูด | ||
| ส่วนล่างของแฟริ่ง (ร่มเงา) | การติดตั้งส่วนล่างของแฟริ่งและฝาครอบด้านล่างของตัวป้องกันลูกปืนรองรับ การติดตั้งโรเตอร์ | |
| ร่างกายส่วนบน | การติดตั้งส่วนบนของเรือนระบายควันบนปะเก็นใยหินในข้อต่อแนวนอน การติดตั้งส่วนบนของแฟริ่ง | |
| ด้านล่างของช่องดูด | การติดตั้งขั้นสุดท้ายและการยึดเข้ากับตัวเครื่องส่วนล่างของช่องดูด | |
| อุปกรณ์ป้องกัน | การติดตั้งปลอกป้องกันแบริ่งรองรับและซีลกล่องบรรจุ | |
| ใบพัดนำทาง | การติดตั้งวงแหวนหมุน คันโยก ก้าน และตัวขับใบพัดนำทาง | |
| ดิฟฟิวเซอร์ | การติดตั้งท่อดิฟฟิวเซอร์บนส่วนรองรับชั่วคราว การติดตั้งส่วนกระจายสามส่วนตามลำดับ การติดตั้งสเปเซอร์ริบระหว่างท่อกับกรวยดิฟฟิวเซอร์ | |
| พัดลมระบายความร้อน | ติดตั้งพัดลมระบายความร้อนและท่ออากาศ | |
| ส่วนบนของช่องดูด | การติดตั้งส่วนบนของช่องดูด, การติดตั้งตัวป้องกันเพลา | |
| เพลาของเครื่องดูดควันและมอเตอร์ไฟฟ้า | การจัดตำแหน่งและการเชื่อมต่อเครื่องระบายควันและเพลามอเตอร์ไฟฟ้า |
7-6. การปรับสมดุลของโรเตอร์
หากส่วนที่หมุนของเครื่องไม่สมดุล เมื่อหมุน การสั่นสะเทือน (การสั่นสะเทือน) ของเครื่องทั้งหมดจะปรากฏขึ้น การสั่นสะเทือนทำให้เกิดความเสียหายต่อตลับลูกปืน ฐานราก และตัวเครื่องเอง เพื่อกำจัด
การสั่นสะเทือนชิ้นส่วนที่หมุนจะต้องมีความสมดุล มีการปรับสมดุลแบบคงที่ซึ่งดำเนินการบนปริซึม และการปรับสมดุลแบบไดนามิกระหว่างการหมุนของชิ้นส่วนที่กำลังปรับสมดุลตัวอย่างเช่น หากโรเตอร์ดังแสดงในรูปที่ 1 7-9,ก,มีครึ่งหนึ่งที่หนักกว่า // จากนั้นในระหว่างการหมุนแรงเหวี่ยงของครึ่งหนึ่งนี้จะมากกว่าแรงเหวี่ยงของครึ่งหนึ่ง / มันจะสร้างแรงกดดันต่อตลับลูกปืนที่แตกต่างกันไป
ข้าว. 7-9. การกระจัดของจุดศูนย์ถ่วงของโรเตอร์
ควบคุมและทำให้เครื่องสั่น ความไม่สมดุลดังกล่าวจะหมดไปโดยการปรับสมดุลแบบคงที่บนปริซึม โรเตอร์ถูกวางไว้พร้อมกับเจอร์นัลของเพลาและปริซึม ซึ่งจัดวางในแนวนอนอย่างแม่นยำ และในขณะเดียวกันก็หมุนโดยให้ด้านที่หนักอยู่ด้านล่าง ที่ด้านบนในร่องพิเศษที่ให้ไว้ในเครื่องฉีดน้ำแรงดันสูงและที่ยึดขดลวดจะมีการเลือกและวางน้ำหนักตะกั่วของน้ำหนักดังกล่าวเพื่อให้โรเตอร์ยังคงอยู่บนปริซึมในตำแหน่งที่ไม่แยแส หลังจากปรับสมดุลแล้ว ตุ้มน้ำหนักตะกั่วมักจะถูกแทนที่ด้วยเหล็กที่มีน้ำหนักเท่ากัน ซึ่งเชื่อมหรือขันเข้ากับโรเตอร์อย่างแน่นหนา อย่างไรก็ตาม สำหรับเกราะและโรเตอร์ยาว การปรับสมดุลแบบสถิตยังไม่เพียงพอแม้ว่าโรเตอร์ทั้งสองซีกจะมีความสมดุลเพื่อให้น้ำหนักของทั้งสองซีกเท่ากัน (รูปที่ 7-9.6) แต่กลับกลายเป็นว่าจุดศูนย์ถ่วงถูกเลื่อนไปตามแกนของเครื่อง ในกรณีนี้ แรงเหวี่ยงของทั้งสองซีกไม่สามารถสมดุลซึ่งกันและกันได้ แต่สร้างแรงสองสามแรงที่ทำให้เกิดแรงกดดันสลับกันบนตลับลูกปืน เพื่อกำจัดการกระทำของแรงคู่นี้ ต้องวางน้ำหนักพิเศษ (รูปที่ 7-9.6) เพื่อสร้างแรงคู่หนึ่งที่กระทำตรงกันข้ามกับแรงคู่ที่ไม่สมดุล ค้นหาขนาดและตำแหน่งของสิ่งเหล่านี้
โหลดสามารถทำได้โดยการปรับสมดุลของโรเตอร์ที่กำลังหมุน (การปรับสมดุลแบบไดนามิก)
ก่อนดำเนินการปรับสมดุลไดนามิก คุณควรตรวจสอบพื้นผิวการทำงานของโรเตอร์ (รอยเจอร์ของเพลาและส่วนปลาย ตัวสับเปลี่ยน แหวนสลิป เหล็กโรเตอร์) เพื่อหาการเบี่ยงเบนหนีศูนย์ และหากจำเป็น ให้กำจัดออก ถ้าคุณใช้ก
ข้าว. 7-10. วงจรสมดุลไดนามิก
“หากใช้แมนเดรลใดๆ จะต้องตรวจสอบความเบี่ยงเบนหนีศูนย์และความไม่สมดุล
ไม่ควรมีชิ้นส่วนที่หลวมบนโรเตอร์ เนื่องจากในกรณีนี้ ไม่สามารถทรงตัวได้ ในการดำเนินการปรับสมดุลแบบไดนามิก โรเตอร์จะถูกวางไว้ในตลับลูกปืนของเครื่องพิเศษ แบริ่งเหล่านี้ติดตั้งอยู่บนสปริงแบบแบนและหากต้องการสามารถยึดโดยไม่เคลื่อนไหวด้วยเบรกพิเศษหรือทำการสั่นสะเทือนฟรีพร้อมกับสปริง (รูปที่ 7-10, a) โรเตอร์ถูกขับเคลื่อนด้วยการหมุนโดยใช้มอเตอร์ไฟฟ้าและคลัตช์ แรงที่ไม่สมดุลที่เกิดขึ้นซึ่งส่งตรงในแนวรัศมีจะทำให้แบริ่งของเครื่องจักรสั่นสะเทือน ในการดำเนินการทรงตัว ตลับลูกปืนตัวหนึ่งจะถูกยึดโดยเบรกโดยไม่เคลื่อนที่ ตลับลูกปืนตัวที่สองจะถูกปล่อยและแกว่งภายใต้อิทธิพลของความไม่สมดุล บนพื้นผิวของโรเตอร์ที่ได้รับการปรับแต่งอย่างแม่นยำ โดยมีศูนย์กลางอยู่ที่แกนเพลา ให้ทำเครื่องหมายด้วยดินสอสีเพื่อแสดงจุดโก่งตัวของโรเตอร์มากที่สุด (รูปที่ 7-10.6)
อย่างไรก็ตาม ณ จุดนี้ ยังไม่สามารถระบุได้อย่างแม่นยำ
ตำแหน่งที่มีความไม่สมดุลของโรเตอร์เนื่องจากการโก่งตัวของโรเตอร์มากที่สุดเกิดขึ้นหลังจากแรงไม่สมดุลผ่านระนาบแนวนอนซึ่งมีเครื่องหมาย (ดินสอ) อยู่
มุมเฉือน (เช่น มุมระหว่างจุดไม่สมดุลและเครื่องหมาย) ขึ้นอยู่กับอัตราส่วนของความเร็วในการหมุนต่อความถี่ธรรมชาติของการสั่นของโรเตอร์บนส่วนรองรับ กล่าวคือ กับความถี่ของการสั่นที่จะเกิดขึ้นหากไม่ - โรเตอร์หมุนที่ติดตั้งอยู่บนส่วนรองรับเครื่องถูกผลัก
เมื่อจำนวนรอบต่อวินาทีตรงกับความถี่ธรรมชาติ เสียงสะท้อนจะเกิดขึ้น การสั่นจะได้ขอบเขตสูงสุด และส่งผลให้เครื่องจักรมีความไวมากที่สุด ดังนั้นพวกเขาจึงพยายามรักษาสมดุลด้วยความเร็วสะท้อน ในกรณีนี้ การเลื่อนเชิงมุมด้านบนจะเข้าใกล้ 90° ดังนั้น ตำแหน่งที่ไม่สมดุลจึงสามารถพบได้โดยการนับจากตรงกลางของเครื่องหมาย - 90° ในการหมุนไปข้างหน้า (และตำแหน่งที่ติดตั้งโหลดคือ 90° ต่อต้านการหมุน) หากเป็นไปไม่ได้ที่จะทำงานด้วยความเร็วเรโซแนนซ์ด้วยเหตุผลบางประการ ดังนั้นเพื่อกำหนดตำแหน่งของความไม่สมดุล ให้ทำการทดลองที่อธิบายไว้ซ้ำในทิศทางตรงกันข้ามของการหมุนด้วยจำนวนรอบต่อนาทีเท่ากัน เครื่องหมายทำด้วยดินสอที่มีสีต่างกัน จากนั้นจุดกึ่งกลางระหว่างเครื่องหมายทั้งสองจะกำหนดตำแหน่งของความไม่สมดุล มีการติดตั้งตุ้มน้ำหนักไว้ที่จุดตรงข้ามที่มีเส้นทแยงมุม ขนาดของภาระนี้จะถูกกำหนดโดยการเลือกจนกว่าการสั่นสะเทือนของตลับลูกปืนจะหายไป แทนที่จะเสริมกำลังรับน้ำหนัก การปรับสมดุลสามารถทำได้โดยการเจาะส่วนตรงข้ามของสมอออก หลังจากที่โรเตอร์ด้านหนึ่งสมดุลแล้ว ตลับลูกปืนของด้านนี้จะถูกยึดไว้โดยไม่เคลื่อนไหว และตลับลูกปืนของด้านที่สองจะถูกปล่อยออก และด้านที่สองจะสมดุลโดยใช้เทคนิคที่คล้ายกัน หลังจากนั้นจะมีการตรวจสอบความสมดุลของด้านแรกและปรับหากจำเป็น ฯลฯ
ปัจจุบันมีเครื่องจักรจำนวนมากสำหรับการปรับสมดุลแบบไดนามิก ซึ่งกำหนดตำแหน่งและขนาดของโหลดได้ค่อนข้างสะดวกและแม่นยำ วิธีการใช้งานเครื่องเหล่านี้ระบุไว้ในคำแนะนำของผู้ผลิต
ในกรณีที่ไม่มีเครื่องจักรพิเศษ การปรับสมดุลแบบไดนามิกสามารถทำได้บนไม้ที่ทนทาน
คานไม้วางบนแผ่นยาง บนคานเหล่านี้ เจอร์นัลของเพลาของโรเตอร์ที่กำลังปรับสมดุลจะถูกวางโดยตรง หรือเปลือกลูกปืนซึ่งมีเจอร์นัลของเพลาอยู่ ด้วยความช่วยเหลือของเวดจ์ทำให้คานสามารถยึดนิ่งได้ โรเตอร์ถูกหมุนโดยสายพานขับเคลื่อนที่ล้อมรอบเหล็กโดยตรง จากนั้นลิ่มจะถูกถอดออก และปล่อยให้แบริ่งสั่นสะเทือนบนแผ่นยาง กระบวนการปรับสมดุลจะคล้ายกับที่อธิบายไว้ข้างต้น
ในสภาพการซ่อมแซม โดยเฉพาะเครื่องจักรขนาดใหญ่ แนะนำให้สมดุลในรูปแบบประกอบ [L. 8]; เพื่อจุดประสงค์นี้ เครื่องจะเริ่มทำงานและวัดการสั่นสะเทือนของตลับลูกปืน การวัดนี้ควรทำโดยใช้ไวโบรมิเตอร์ (เช่น ประเภท VR-1, VR-3, 2VK, ZVK)
ในกรณีที่ไม่มีไวโบรมิเตอร์ ก็สามารถวัดการสั่นสะเทือนได้ด้วยตัวแสดงที่ติดตั้งอยู่บนด้ามจับที่หนักมาก ด้วยการกดหัววัดของตัวแสดงดังกล่าวไปที่ส่วนที่สั่น คุณสามารถกำหนดขนาดของการแกว่งของการสั่นสะเทือนด้วยความกว้างของโครงร่างที่เบลอของ ลูกศร
โปรดทราบว่าการอ่านค่าของไวโบรมิเตอร์นั้นขึ้นอยู่กับความเร็วในการหมุนอย่างมากดังนั้นจึงสามารถใช้การอ่านเป็นหลักในการเปรียบเทียบที่จำนวนรอบการหมุนของเครื่องจักรเท่ากันซึ่งเพียงพอสำหรับวัตถุประสงค์ในการปรับสมดุล
โดยการวัดความสั่นสะเทือนของแบริ่งในทิศทางต่างๆ จะพบจุดที่มีการสั่นสะเทือนมากที่สุด การปรับสมดุลจะดำเนินการ ณ จุดนี้
ในการค้นหาขนาดและตำแหน่งของตุ้มน้ำหนักสมดุล ให้วางตุ้มน้ำหนักทดสอบบนโรเตอร์ ณ จุดที่ต้องการ และวัดการสั่นสะเทือนอีกครั้ง แน่นอนว่า จากการศึกษาว่าโหลดทดสอบส่งผลต่อแรงสั่นสะเทือนอย่างไร โดยทราบขนาดและตำแหน่งของแรงสั่นสะเทือนนั้น จึงสามารถระบุทั้งขนาดของความไม่สมดุลและตำแหน่งของมันได้ หากเป็นไปได้ที่จะวัดว่าขนาดและระยะของการสั่นสะเทือนเปลี่ยนแปลงไปอย่างไรอันเป็นผลจากการติดตั้งตุ้มน้ำหนักทดสอบ (ดูด้านล่าง) ก็สามารถวัดได้สองแบบ: ก่อนและหลังการติดตั้งตุ้มน้ำหนักทดสอบ หากไม่สามารถระบุการเปลี่ยนแปลงเฟสได้ จำเป็นต้องทำการวัดการสั่นสะเทือนจำนวนมากขึ้น (3-4) ตุ้มน้ำหนักทดสอบจะถูกวางไว้ที่จุดใดจุดหนึ่งตามใจชอบก่อน แล้วจึงวางสลับกันที่จุดหนึ่งหน่วยของวงกลมทางด้านขวาและซ้ายของจุดแรก
หากต้องการกำหนดการเปลี่ยนเฟส คุณสามารถใช้เครื่องหมายบนเพลาตามที่อธิบายไว้ข้างต้น ในเวลาเดียวกันเพลาถูกทาสีด้วยชอล์กและปากกาเขียนคมอย่างระมัดระวังมีการใช้เครื่องหมาย (ให้สั้นที่สุด) ซึ่งตรงกลางนั้นสอดคล้องกับส่วนเบี่ยงเบนที่ยิ่งใหญ่ที่สุดของเพลาในระนาบที่เครื่องหมาย (ตัวเขียน) ตั้งอยู่ ระยะเชิงมุม (มุม a) ระหว่างเครื่องหมายในกรณีที่ไม่มีโหลดทดสอบและมีอยู่เป็นการวัดการเปลี่ยนเฟสการสั่นที่เกิดจากการใส่ตุ้มน้ำหนักทดสอบ
แม่นยำยิ่งขึ้น การเปลี่ยนเฟสถูกกำหนดโดยใช้วิธีสโตรโบสโคปิก ในกรณีนี้ จะมีการติดเครื่องหมายไว้ที่ปลายเพลา โดยมีแสงวาบของตะเกียงก๊าซ หลอดไฟนี้ควบคุมโดยหน้าสัมผัสพิเศษที่มีอยู่ ชม.ไวโบรมิเตอร์ ซึ่งปิดหนึ่งครั้งต่อการหมุนเพลา ณ ขณะนั้นใกล้กับการแกว่งสูงสุดของการสั่นสะเทือนมากที่สุด
เครื่องหมายบนเพลาหมุนจะปรากฏอยู่กับที่ (เนื่องจากหลอดไฟจะส่องสว่างทุกครั้งที่ไปถึงตำแหน่งเดิมทุกประการหลังจากการปฏิวัติหนึ่งครั้ง) และยังสามารถติดเครื่องหมายกับเพลาและส่วนที่อยู่นิ่งของเครื่องได้อีกด้วย
หลังจากทดสอบโหลดแล้ว เครื่องหมายบนเพลาจะเคลื่อนที่สัมพันธ์กับเครื่องหมายบนชิ้นส่วนที่อยู่นิ่ง ด้วยการทำเครื่องหมายที่สองบนชิ้นส่วนที่อยู่นิ่งซึ่งสอดคล้องกับตำแหน่งใหม่ของเครื่องหมายบนเพลา และการวัดระยะเชิงมุม (มุม a) ระหว่างจุดเหล่านั้น เราจะกำหนดมุมของการเปลี่ยนเฟสการสั่น
ความสามารถในการกำหนดเฟสโดยใช้วิธีสโตรโบสโคปนั้นมีให้ในไวโบรสโคปปรับสมดุลแบบพิเศษของระบบ Kolesnik 2VK, ZVK ที่ผลิตโดยโรงงานเครื่องมือเลนินกราด และในไวโบรสโคปประเภท BIP ของโรงงานระบบเครื่องกลไฟฟ้าเคียฟ
วิธีการระบุตำแหน่งของโหลดแบบกราฟิกจะมองเห็นได้จากรูปที่ 1 7-11,ก. ที่นี่ส่วนคือ "เวกเตอร์" โอ้ในระดับหนึ่งจะเท่ากับแอมพลิจูดของการแกว่งของแบริ่งก่อนทำการทดสอบโหลด ทดลองโหลด ร ตวางอยู่ในระนาบที่เลื่อนจากเครื่องหมายที่ได้รับบนเพลาไปบางมุม เช่น 90° - เส้น เกี่ยวกับ วี.ตอนนี้เข้าวัดแล้ว.ช่วงสวิงของแบริ่ง (ในขณะที่ จำนวนรอบการปฏิวัติเท่ากันต่อนาที) ทำเครื่องหมายใหม่ และเมื่อพิจารณาการเปลี่ยนแปลงเชิงมุมระหว่างเครื่องหมาย - a ให้เราพล็อตมันในระดับเดียวกันที่มุม "ถึงเวกเตอร์ โอ้เวกเตอร์ อ้อ
แน่นอนว่าถ้าเป็นเวกเตอร์ โอ้พรรณนาถึงการสั่นสะเทือนจากความไม่สมดุล เวกเตอร์ อบการสั่นสะเทือนจากการกระทำร่วมของโหลดทดสอบและความไม่สมดุล ตามด้วยอายุที่แตกต่างกัน พรู เกี่ยวกับกำหนดขนาดและเฟสของการสั่นสะเทือนที่เกิดจากโหลดทดสอบ
รูปที่ 7-11 การกำหนดขนาดและตำแหน่งของตุ้มน้ำหนักสมดุล
เพื่อกำจัดการสั่นจากความไม่สมดุล คุณต้องหมุนเวกเตอร์ เกี่ยวกับด้วยมุม § และเพิ่มให้เท่ากับเวกเตอร์ โอ้และมุ่งตรงต่อเขา แน่นอนว่าโหลดทดสอบ P gr จะต้องถูกเลื่อนจากจุดนั้น ในตรงประเด็น กับ(ตามมุม S) และเพิ่มขึ้นสัมพันธ์กับส่วนต่างๆ ^-. น้ำหนักที่สมดุล
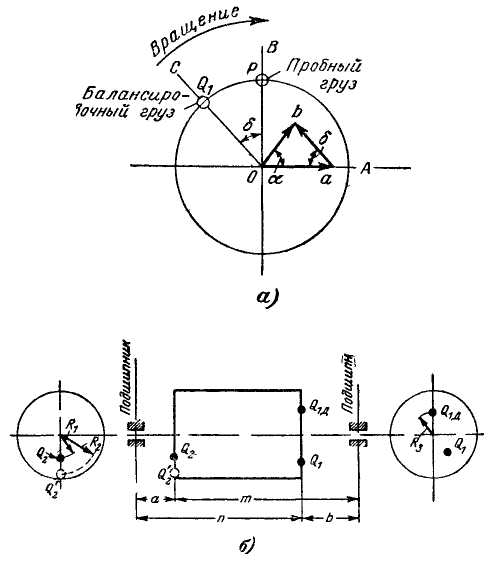
ฉันจึงต้องเท่ากับ:
ด้านที่สองของเครื่องมีความสมดุลในลักษณะเดียวกัน แต่จะมีการกำหนดภาระสำหรับด้านนี้ คิว"ซกระจายไปสองโหลด Q 2 และ Q H . ทำเช่นนี้เพื่อไม่ให้เสียสมดุลของด้านแรก
สินค้า<2г помещается в точку, определенную описанным выше способом для второй стороны, а груз СЬ Д переносится на первую сторону и закрепляется в точке диаметрально противоположной Q 2 (рис.-7-11,6). Величины грузов Q 2 ฉันชื่อเฉียถูกกำหนดจากนิพจน์:
มิติข้อมูลอยู่ที่ไหน เสื้อ, พี, เอ, ข, RiR^R 3มองเห็นได้จากรูป 7-111, ข.แม้ว่าการกระจายน้ำหนัก Q"2 จะเป็นเช่นนี้ แต่โดยปกติแล้วจำเป็นต้องดำเนินการ (แก้ไข) การปรับสมดุลด้านแรกอีกครั้งหลังจากติดตั้งตุ้มน้ำหนักแล้ว คำถามที่ 2และเอสเจ ดี.
วิธีที่ง่ายที่สุดในการตรวจสอบคุณภาพของการทรงตัวคือการติดตั้งเครื่องจักรบนแผ่นพื้นแนวนอนที่ไสอย่างราบรื่น หากเครื่องจักรมีความสมดุลที่น่าพอใจและทำงานด้วยความเร็วที่กำหนด ก็ไม่ควรมีการโยกหรือการเคลื่อนไหวบนเพลต การตรวจสอบจะดำเนินการที่ความเร็วรอบเดินเบาในโหมดเครื่องยนต์
ตำแหน่งของแกนความเฉื่อยของโรเตอร์ขึ้นอยู่กับการกระจายตัวขององค์ประกอบรอบเส้นรอบวง หากมวลของชุดประกอบและชิ้นส่วนทั้งหมดมีการกระจายเท่าๆ กัน แกนความเฉื่อยจะเกิดขึ้นพร้อมกับแกนการหมุน
โรเตอร์ดังกล่าวเรียกว่าสมดุล ในกรณีส่วนใหญ่ มวลมีการกระจายไม่เท่ากัน แกนความเฉื่อยจะเลื่อนสัมพันธ์กับแกนหมุน และความไม่สมดุลจะปรากฏขึ้นเท่ากับผลคูณของมวลที่ไม่สมดุลและความเยื้องศูนย์ โรเตอร์ดังกล่าวเรียกว่าไม่สมดุล ในโรเตอร์ที่ไม่สมดุล แรงเหวี่ยงจะเกิดขึ้นตามสัดส่วนกับความไม่สมดุลและกำลังสองของความเร็วในการหมุน
ข้าว. 1. ประเภทของความไม่สมดุล:
a - คงที่, b - ไดนามิก, c - ผสม
เมื่อแรงพุ่งขึ้น แรงกดบนแบริ่งจะลดลง เมื่อโรเตอร์หมุน 180° แรงจะเคลื่อนลง ส่งผลให้แรงกดบนแบริ่งเพิ่มขึ้น
การเปลี่ยนแปลงความดันบนแบริ่งเป็นระยะทำให้เกิดการสั่นสะเทือนของโรเตอร์ซึ่งส่งผ่านแบริ่งไปยังตัวถังและฐานของเครื่องทำให้ประสิทธิภาพของหน้าสัมผัสแบบเลื่อนลดลงและลดความทนทานของแบริ่ง
โรเตอร์ที่ไม่สมดุลจะสมดุล กระบวนการปรับสมดุลเกี่ยวข้องกับการจัดแนวแกนความเฉื่อยของโรเตอร์กับแกนหมุนโดยการเอาโลหะออกหรือติดตั้งตุ้มน้ำหนักสมดุลในบางตำแหน่งรอบเส้นรอบวงของโรเตอร์ โรเตอร์ของเครื่องจักรความเร็วสูงมีความสมดุลเป็นพิเศษ
ความไม่สมดุลของโรเตอร์เกิดขึ้นได้สามประเภท: คงที่ ไดนามิก และผสม ด้วยความไม่สมดุลแบบคงที่ แกนของความเฉื่อย A-A (รูปที่ 1, a) ซึ่งผ่านจุดศูนย์ถ่วง C จะถูกเลื่อนขนานกับแกนการหมุนของโรเตอร์ ในกรณีนี้ แรงเหวี่ยง RCT จากความไม่สมดุลทำให้เกิดการสั่นสะเทือนบนส่วนรองรับที่มีขนาดและเฟสเท่ากัน ความไม่สมดุลแบบไดนามิกนั้นมีลักษณะเฉพาะโดยตำแหน่งของแกนความเฉื่อย A-A ที่มุมกับแกนการหมุน (รูปที่ 1, b) ในกรณีนี้ แรงเหวี่ยงคู่หนึ่ง Ram ทำให้เกิดการสั่นสะเทือนบนส่วนรองรับที่มีขนาดเท่ากันและมีเฟสตรงกันข้าม ความไม่สมดุลแบบผสม (รูปที่ 1, c) ส่งผลให้เกิดแรงคู่ Rn" และแรง RCT; การสั่นสะเทือนของส่วนรองรับในกรณีนี้แตกต่างกันทั้งขนาดและเฟส ที่พบบ่อยที่สุดคือความไม่สมดุลแบบผสม
มีวิธีการปรับสมดุลสองวิธี: แบบคงที่และไดนามิก สำหรับเครื่องจักรความเร็วต่ำที่มีโรเตอร์สั้น มักจะจำกัดอยู่ที่การปรับสมดุลแบบคงที่ สำหรับเครื่องจักรอื่นๆ หลังจากการปรับสมดุลแบบคงที่แล้ว จะดำเนินการปรับสมดุลแบบไดนามิก
ในระหว่างการปรับสมดุลแบบคงที่ โลหะจะถูกเอาออกหรือมีการติดตั้งตุ้มน้ำหนักไว้ที่ปลายด้านหนึ่งของโรเตอร์ ในการปรับสมดุลแบบไดนามิก แต่ละครึ่งหนึ่งของโรเตอร์จะถูกปรับสมดุลแยกกัน
ในระหว่างการปรับสมดุลแบบคงที่ โรเตอร์ 1 (รูปที่ 2, a) จะถูกวางโดยปลายเพลาบนไม้บรรทัดแนวนอนขนาน - ปริซึม 3 ซึ่งตั้งค่าตามระดับ ความเบี่ยงเบนจากระดับแนวนอนไม่ควรเกิน 0.02 มม. ต่อความยาว 1,000 มม. ความกว้างของพื้นผิวการทำงานของปริซึมจะถูกเลือกขึ้นอยู่กับมวลของโรเตอร์
| น้ำหนักโรเตอร์, กก | จาก 30 เป็น 300 |
จาก 300 ถึง 2000 |
||
ความกว้างของพื้นผิวการทำงานของปริซึม mm |
หากเส้นผ่านศูนย์กลางของเจอร์นัลเพลาไม่เท่ากัน ในการจัดแนวแกนโรเตอร์ วงแหวน 2 จะถูกติดตั้งบนเจอร์นัลที่มีเส้นผ่านศูนย์กลางเล็กกว่า ซึ่งมีความหนาเท่ากับความแตกต่างในรัศมีของเจอร์นัล 
ข้าว. 2. การปรับสมดุลแบบคงที่:
a - บนปริซึม, 6 - บนตัวรองรับการหมุน
ผลลัพธ์ที่แม่นยำยิ่งขึ้นนั้นได้มาจากการปรับสมดุลแบบคงที่บนส่วนรองรับการหมุน (รูปที่ 2, b) ด้วยตลับลูกปืนกลิ้ง เส้นผ่านศูนย์กลาง D และความยาวของลูกกลิ้ง 4 ถูกเลือกขึ้นอยู่กับมวลของโรเตอร์ 1
ในระหว่างการปรับสมดุลแบบคงที่ โรเตอร์จะหมุนบนปริซึมหรือส่วนรองรับซึ่งติดตั้งในตำแหน่งต่างๆ หากแกนความเฉื่อยอยู่เหนือแกนของเพลา โรเตอร์ภายใต้อิทธิพลของมวลที่ไม่สมดุล m (รูปที่ 2, a) จะเริ่มหมุนและหลังจากการแกว่งหลายครั้งในทิศทางใดทิศทางหนึ่งก็หยุด มวลที่ไม่สมดุลจะจบลงที่ตำแหน่งล่าง ตุ้มน้ำหนักจะติดอยู่ที่จุดสูงสุดของโรเตอร์ จากนั้นโรเตอร์จะถูกติดตั้งอีกครั้งในตำแหน่งต่างๆ โดยเลือกมวลของสินค้าที่โรเตอร์หยุดหมุนในตำแหน่งใดๆ
การปรับสมดุลแบบไดนามิกของโรเตอร์จะดำเนินการด้วยเครื่องจักรพิเศษที่ทำให้สามารถกำหนดมวลและตำแหน่งของตุ้มน้ำหนักสมดุลในระนาบแก้ไขสองระนาบ* A และ B (รูปที่ 3) โรเตอร์ 1 วางอยู่ในส่วนรองรับสปริงโหลด 2 และ 9 ของเครื่อง และขับเคลื่อนให้หมุนด้วยมอเตอร์ไฟฟ้า 7
การสั่นสะเทือนของตัวรองรับที่เกิดจากความไม่สมดุลของโรเตอร์จะถูกส่งไปยังคอยล์ 3 ซึ่งเคลื่อนที่ในสนามแม่เหล็กระหว่างขั้ว N และ S EMF เกิดขึ้นในคอยล์ตามสัดส่วนกับแอมพลิจูดของการสั่นสะเทือนของตัวรองรับ
* ระนาบการแก้ไขคือระนาบที่ตั้งฉากกับฐานการหมุน ซึ่งความไม่สมดุลของโรเตอร์จะถูกชดเชยโดยการเอาออกหรือเพิ่มมวล ระนาบของชิ้นส่วนต่างๆ เช่น เครื่องฉีดน้ำแรงดันสูง พัดลม ตัวสะสม หรือชิ้นส่วนพิเศษ วงแหวนปรับสมดุลสามารถใช้เป็นระนาบแก้ไขได้
แรงดันไฟฟ้าจากขดลวดจะถูกส่งผ่านเครื่องขยายเสียง 4 ไปยังอุปกรณ์ b และไปยังวงจรแฟลช 5 ไฟกะพริบของไฟแฟลช 8 จะส่องสว่างสเกลบนแกนหมุนของเครื่องจักร กะพริบเกิดขึ้นพร้อมกับการกระจัดของการสั่นสูงสุด เช่น โมเมนต์ที่มวลที่ไม่สมดุลอยู่ในตำแหน่งบนหรือล่าง 
ข้าว. 3. โครงร่างของเครื่องปรับสมดุล
ไฟแฟลชจะสร้างแฟลชทันทีหนึ่งครั้งสำหรับการหมุนโรเตอร์แต่ละครั้ง ทำให้สเกลหมุนดูเหมือนหยุดอยู่ที่ตำแหน่งใดตำแหน่งหนึ่ง เครื่องหยุดทำงาน โรเตอร์จะหมุนไปยังตำแหน่งที่สังเกตเห็นบนเครื่องชั่งระหว่างการหมุน ดังนั้นจึงกำหนดตำแหน่งที่ควรติดตุ้มน้ำหนักควบคุม: ตำแหน่ง "เบา" และ "หนัก" จะอยู่ในระนาบแนวตั้ง ความไม่สมดุลของโรเตอร์ถูกกำหนดโดยใช้ไดอัลเกจ 6 เครื่องเปิดอีกครั้ง หากติดตั้งน้ำหนักอย่างถูกต้อง ค่าที่อ่านได้ของอุปกรณ์จะลดลง โดยการค่อยๆ เพิ่มภาระ ความไม่สมดุลจะหมดไป หากการอ่านค่าเครื่องมือเพิ่มขึ้น ต้องขยับโหลด 180° ขั้นแรก ให้ทำการปรับสมดุลในระนาบเดียว เช่น ในระนาบ A โดยเชื่อมต่อคอยล์ด้านซ้ายเข้ากับเครื่องขยายเสียง จากนั้นจะใช้สวิตช์เพื่อเชื่อมต่อคอยล์ตัวที่สองเพื่อสร้างสมดุลให้กับอีกครึ่งหนึ่งของโรเตอร์ โรเตอร์ของเครื่องจักรขนาดใหญ่จะปรับสมดุลในตลับลูกปืนของตัวเองเมื่อเครื่องจักรหมุนโดยไม่มีโหลด
การสั่นสะเทือนของแบริ่งวัดโดยใช้ไวโบรมิเตอร์หรือไดอัลอินดิเคเตอร์
สำหรับเครื่องจักรไฟฟ้า มีความแม่นยำในการทรงตัวสามระดับ: ศูนย์ ที่หนึ่งและที่สอง ระดับความแม่นยำที่สองถูกสร้างขึ้นสำหรับเครื่องจักรที่มีข้อกำหนดระดับการสั่นสะเทือนปกติ ระดับแรก - สำหรับเครื่องจักรที่มีเสียงรบกวนต่ำและเครื่องจักรที่มีความแม่นยำในการหมุนเพิ่มขึ้น (สำหรับเครื่องมือกล เครื่องใช้ในครัวเรือน ฯลฯ) ระดับศูนย์เป็นสิ่งจำเป็นสำหรับเครื่องจักรที่มีความต้องการระดับการสั่นสะเทือนสูงเป็นพิเศษ ในเครื่องจักรเหล่านี้ จะใช้ตลับลูกปืนที่มีระดับความแม่นยำสูง โรเตอร์มีความสมดุลในเครื่องที่ประกอบ และมีหน้าต่างอยู่ในแผงสำหรับเข้าถึงจุดสมดุล
ภาพวาดของโรเตอร์บ่งบอกถึงระนาบการแก้ไขและวิธีการกำจัดความไม่สมดุล รวมถึงความไม่สมดุลของสารตกค้างที่ยอมรับได้ เนื่องจากแทบเป็นไปไม่ได้เลยที่จะบรรลุความสมดุลของโรเตอร์อย่างสมบูรณ์ในระหว่างกระบวนการปรับสมดุล
โรเตอร์จะต้องสมดุลตามกฎความปลอดภัยต่อไปนี้ เมื่อทรงตัวบนปริซึมแบบคงที่ ควรวางโรเตอร์ไว้ตรงกลางของปริซึมและหมุนช้าๆ เพื่อไม่ให้หล่นขณะกลิ้ง ความยาวของปริซึมต้องเท่ากับที่โรเตอร์สามารถหมุนได้อย่างน้อยหนึ่งครั้งในแต่ละทิศทาง ก่อนติดตั้งโรเตอร์บนปริซึม คุณต้องตรวจสอบให้แน่ใจว่าความยาวของเพลามากกว่าระยะห่างระหว่างปริซึม ขั้นแรกให้ตรวจสอบตลับลูกปืนที่หมุนเพื่อจับยึดตลับลูกปืน เมื่อดำเนินการปรับสมดุลแบบไดนามิก อย่าหยุดโรเตอร์ด้วยมือ ตุ้มน้ำหนักต้องได้รับการรักษาความปลอดภัยอย่างระมัดระวัง แขนเสื้อของชุดทำงานต้องมีข้อมือเพื่อป้องกันไม่ให้ชิ้นส่วนที่หมุนจับได้
ความแตกต่างระหว่างความสมดุลแบบคงที่และไดนามิกของชิ้นส่วนวัตถุประสงค์ เทคโนโลยีการปรับสมดุลสมอเรือ
ความไม่สมดุลของส่วนที่หมุนของหัวรถจักรดีเซลอาจเกิดขึ้นได้ทั้งระหว่างการใช้งานเนื่องจากการสึกหรอไม่สม่ำเสมอ การโค้งงอ การสะสมของสารปนเปื้อนในที่ใดที่หนึ่ง การสูญเสียน้ำหนักที่สมดุล และระหว่างกระบวนการซ่อมแซมเนื่องจากการประมวลผลชิ้นส่วนที่ไม่เหมาะสม (การกระจัดของ แกนหมุน) หรือเพลาปรับแนวไม่ถูกต้อง เพื่อให้ชิ้นส่วนสมดุลกัน การปรับสมดุลมีสองประเภท: คงที่และไดนามิก
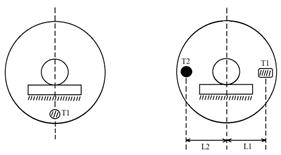
ข้าว. 1. โครงการปรับสมดุลชิ้นส่วนแบบคงที่:
T1 - มวลของชิ้นส่วนที่ไม่สมดุล T2 - มวลของภาระสมดุล
L1, L2 - ระยะห่างจากแกนหมุน
การปรับสมดุลแบบคงที่สำหรับชิ้นส่วนที่ไม่สมดุล มวลของมันจะอยู่ในตำแหน่งที่ไม่สมมาตรสัมพันธ์กับแกนการหมุน ด้วยเหตุนี้ เมื่อชิ้นส่วนดังกล่าวอยู่ในตำแหน่งคงที่ เช่น เมื่อหยุดนิ่ง จุดศูนย์ถ่วงจะมีแนวโน้มที่จะอยู่ในตำแหน่งที่ต่ำกว่า (รูปที่ 1) เพื่อให้ชิ้นส่วนมีความสมดุล โหลดมวล T2 จะถูกเพิ่มจากด้านตรงข้ามที่มีเส้นผ่านศูนย์กลาง เพื่อให้โมเมนต์ T2L2 ของมันเท่ากับโมเมนต์ของมวลที่ไม่สมดุล T1L1 ภายใต้เงื่อนไขนี้ ชิ้นส่วนจะสมดุลในตำแหน่งใดก็ได้ เนื่องจากจุดศูนย์ถ่วงจะอยู่บนแกนหมุน ความสมดุลจะต้องทำได้โดยการเอาส่วนหนึ่งของโลหะของชิ้นส่วนออกโดยการเจาะ เลื่อย หรือการกัดจากด้านข้างของมวลที่ไม่สมดุล T1 ในแบบร่างของชิ้นส่วนและในกฎการซ่อม จะมีการกำหนดพิกัดความเผื่อสำหรับการปรับสมดุลของชิ้นส่วน ซึ่งเรียกว่าความไม่สมดุล (g/cm)
ชิ้นส่วนแบนที่มีอัตราส่วนความยาวต่อเส้นผ่านศูนย์กลางเล็กน้อยจะต้องได้รับการปรับสมดุลแบบคงที่ เช่น ล้อเฟืองของกระปุกเกียร์แบบฉุด ใบพัดของพัดลมตู้เย็น ฯลฯ การปรับสมดุลแบบคงที่จะดำเนินการบนปริซึมขนานแนวนอน แท่งทรงกระบอก หรือบนตัวรองรับลูกกลิ้ง พื้นผิวของปริซึม แท่ง และลูกกลิ้งจะต้องได้รับการประมวลผลอย่างระมัดระวัง ความแม่นยำของการปรับสมดุลแบบคงที่ส่วนใหญ่ขึ้นอยู่กับสภาพของพื้นผิวของชิ้นส่วนเหล่านี้
การปรับสมดุลแบบไดนามิกการปรับสมดุลแบบไดนามิกมักจะดำเนินการกับชิ้นส่วนที่มีความยาวเท่ากับหรือมากกว่าเส้นผ่านศูนย์กลาง ในรูป รูปที่ 2 แสดงโรเตอร์ที่มีความสมดุลทางสถิต โดยมวล T จะมีความสมดุลด้วยภาระมวล M โรเตอร์นี้เมื่อหมุนช้าๆ จะอยู่ในสภาวะสมดุลในทุกตำแหน่ง ในกรณีนี้ ด้วยการหมุนอย่างรวดเร็ว แรงเหวี่ยง F1 และ F2 ที่มีทิศทางเท่ากันแต่ตรงข้ามกันจะเกิดขึ้น ในกรณีนี้ โมเมนต์ FJU ก่อตัวขึ้นซึ่งมีแนวโน้มที่จะหมุนแกนโรเตอร์ผ่านมุมที่กำหนดรอบจุดศูนย์ถ่วงของมัน 🐠🐠🐠 มีความไม่สมดุลแบบไดนามิกของโรเตอร์พร้อมกับผลที่ตามมาทั้งหมด (การสั่นสะเทือน การสึกหรอที่ไม่สม่ำเสมอ ฯลฯ) โมเมนต์ของแรงคู่นี้จะต้องสมดุลโดยแรงอีกคู่หนึ่งที่กระทำในระนาบเดียวกันและสร้างโมเมนต์ปฏิกิริยาที่เท่ากันเท่านั้น ในการทำเช่นนี้ ในตัวอย่างของเรา เราจำเป็นต้องใช้น้ำหนักสองน้ำหนัก Wx = m2 กับโรเตอร์ในระนาบเดียวกัน (แนวตั้ง) ที่ระยะห่างเท่ากันจากแกนการหมุน โหลดและระยะห่างจากแกนการหมุนจะถูกเลือกเพื่อให้แรงเหวี่ยงจากโหลดเหล่านี้สร้างโมเมนต์ /y ตอบโต้โมเมนต์ FJi และทำให้สมดุล ส่วนใหญ่แล้ว ตุ้มน้ำหนักที่สมดุลจะติดอยู่ที่ระนาบส่วนท้ายของชิ้นส่วนหรือส่วนหนึ่งของโลหะที่ถูกถอดออกจากระนาบเหล่านี้
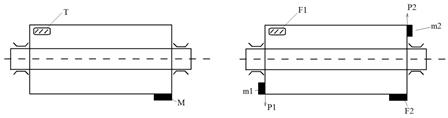
ข้าว. 2. โครงการปรับสมดุลไดนามิกของชิ้นส่วน:
T - มวลโรเตอร์ M คือมวลของภาระที่สมดุล F1, F2 - ไม่สมดุลลดลงเหลือระนาบมวลโรเตอร์ m1,m2 - สมดุลลดลงเหลือระนาบมวลโรเตอร์ P1 P 2 - ปรับสมดุลแรงเหวี่ยง;
เมื่อทำการซ่อมตู้รถไฟดีเซล การปรับสมดุลแบบไดนามิกจะดำเนินการกับชิ้นส่วนที่หมุนเร็วเช่นโรเตอร์เทอร์โบชาร์จเจอร์, เกราะของมอเตอร์ฉุดหรือเครื่องจักรไฟฟ้าอื่น ๆ , ใบพัดโบลเวอร์ที่ประกอบกับเกียร์ขับเคลื่อน, เพลาปั๊มน้ำที่ประกอบกับใบพัดและ ล้อเฟืองและเพลาคาร์ดานที่ขับเคลื่อนกลไกกำลัง
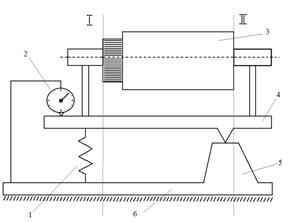
ข้าว. 3. แผนผังของเครื่องปรับสมดุลแบบคอนโซล:
1 - สปริง; 2 - ตัวบ่งชี้; 3 สมอ; 4 - เฟรม; 5 - รองรับเครื่องจักร; รองรับเตียง 6 เตียง;
เครื่องบิน I, II
การปรับสมดุลแบบไดนามิกจะดำเนินการบนเครื่องปรับสมดุล แผนผังของเครื่องประเภทคอนโซลดังกล่าวแสดงในรูปที่ 1 3. ตัวอย่างเช่นการปรับสมดุลกระดองของมอเตอร์ฉุดจะดำเนินการตามลำดับนี้ จุดยึด 3 วางอยู่บนส่วนรองรับของโครงสวิง 4 เฟรมวางอยู่บนจุดหนึ่งบนส่วนรองรับของเครื่อง 5 และอีกจุดอยู่บนสปริง 1 เมื่อกระดองหมุน มวลที่ไม่สมดุลของส่วนใด ๆ ของมัน ( ยกเว้นมวลที่นอนอยู่ในระนาบ II - II) ทำให้เฟรมแกว่ง แอมพลิจูดของการแกว่งของเฟรมจะถูกบันทึกโดยตัวบ่งชี้ที่ 2 เพื่อสร้างสมดุลของกระดองในระนาบ I - I ตุ้มน้ำหนักทดสอบของตุ้มน้ำหนักที่แตกต่างกันจะถูกติดสลับกันที่ปลายด้านที่สะสม (กับกรวยแรงดัน) และการสั่นของเฟรมจะถูก หยุดหรือลดลงเป็นค่าที่ยอมรับได้ ถัดไปจะพลิกจุดยึดเพื่อให้เครื่องบิน I-I ผ่านการรองรับคงที่ของเฟรม 6 และการดำเนินการเดียวกันนี้ซ้ำสำหรับเครื่องบิน II-II ในกรณีนี้ ตุ้มน้ำหนักจะติดอยู่กับเครื่องฉีดน้ำแรงดันด้านหลังของกระดอง
หลังจากเสร็จสิ้นงานประกอบทั้งหมด ชิ้นส่วนของชุดอุปกรณ์ที่เลือกจะถูกทำเครื่องหมาย (ด้วยตัวอักษรหรือตัวเลข) ตามข้อกำหนดของแบบ
ความแตกต่างระหว่างความสมดุลแบบคงที่และไดนามิกของชิ้นส่วนวัตถุประสงค์ เทคโนโลยีการปรับสมดุลสมอเรือ - แนวคิดและประเภท การจำแนกประเภทและคุณลักษณะของหมวดหมู่ "ความแตกต่างระหว่างการปรับสมดุลแบบคงที่และไดนามิกของชิ้นส่วน วัตถุประสงค์ เทคโนโลยีของการปรับสมดุลเกราะ" 2014, 2015.