พาสปอร์ตของมอเตอร์ไฟฟ้าระบุกระแสที่โหลดพิกัดบนเพลา ตัวอย่างเช่น หากระบุ 13.8/8 A หมายความว่าเมื่อเครื่องยนต์เชื่อมต่อกับเครือข่าย 220 V และที่โหลดที่กำหนด กระแสไฟฟ้าที่ใช้จากเครือข่ายจะเท่ากับ 13.8 A เมื่อเชื่อมต่อกับ 380 เครือข่าย V จะมีการใช้กระแส 8 A นั่นคือความเท่าเทียมกันของพลังงานที่ถูกต้อง: √ 3 x 380 x 8 = √ 3 x 220 x 13.8
เมื่อทราบกำลังไฟของมอเตอร์ (จากหนังสือเดินทาง) คุณสามารถกำหนดพิกัดกระแสไฟได้ เมื่อเครื่องยนต์เปิดอยู่ เครือข่ายสามเฟสกระแสไฟฟ้าพิกัด 380 V สามารถคำนวณได้โดยใช้สูตรต่อไปนี้:
ฉัน n = P n/ (√3U n x η x cosφ) ,
ข้าว. 1. พาสปอร์ตมอเตอร์ไฟฟ้า กำลังไฟพิกัด 1.5 kV, พิกัดกระแสที่แรงดันไฟฟ้า 380 V - 3.4 A.
หากไม่ทราบประสิทธิภาพ และตัวประกอบกำลังของเครื่องยนต์เช่นหากไม่มีแผ่นหนังสือเดินทางบนเครื่องยนต์กระแสไฟฟ้าที่กำหนดสามารถกำหนดได้โดยมีข้อผิดพลาดเล็กน้อยโดยอัตราส่วน "สองแอมแปร์ต่อกิโลวัตต์" เช่น หากกำลังไฟพิกัดของมอเตอร์คือ 10 kW กระแสไฟฟ้าที่ใช้จะอยู่ที่ประมาณ 20 A
สำหรับมอเตอร์ที่แสดงในรูป อัตราส่วนนี้ก็ยังคงอยู่ (3.4 A γ 2 x 1.5) ค่ากระแสที่แม่นยำยิ่งขึ้นเมื่อใช้อัตราส่วนนี้จะได้รับด้วยกำลังมอเตอร์ตั้งแต่ 3 kW ขึ้นไป
เมื่อมอเตอร์ไฟฟ้าไม่ทำงาน กระแสไฟฟ้าเล็กน้อยจะถูกใช้จากเครือข่าย (กระแสไฟฟ้าที่ไม่มีโหลด) เมื่อโหลดเพิ่มขึ้น ปริมาณการใช้กระแสไฟก็จะเพิ่มขึ้นด้วย เมื่อกระแสเพิ่มขึ้น ความร้อนของขดลวดก็จะเพิ่มขึ้น การโอเวอร์โหลดขนาดใหญ่นำไปสู่ความจริงที่ว่ากระแสไฟฟ้าที่เพิ่มขึ้นทำให้เกิดความร้อนสูงเกินไปของขดลวดมอเตอร์และมีอันตรายจากการไหม้เกรียมของฉนวน (มอเตอร์ไฟฟ้าไหม้)
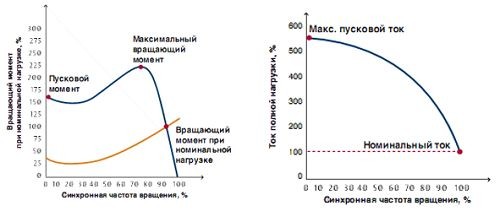
เมื่อถึงเวลาเปิดตัวจากเครือข่าย มอเตอร์ไฟฟ้ากระแสเริ่มต้นที่เรียกว่าถูกใช้ซึ่งอาจมากกว่ากระแสไฟที่กำหนด 3 ถึง 8 เท่า ลักษณะของการเปลี่ยนแปลงปัจจุบันแสดงอยู่บนกราฟ (รูปที่ 2, a)
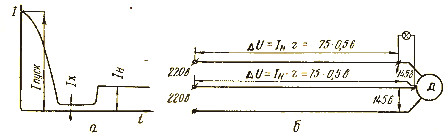
ข้าว. 2. ลักษณะของการเปลี่ยนแปลงกระแสไฟฟ้าที่มอเตอร์ใช้จากเครือข่าย (a) และผลกระทบของกระแสไฟฟ้าสูงต่อความผันผวนของแรงดันไฟฟ้าในเครือข่าย (b)
ค่าที่แน่นอนของกระแสสตาร์ทสำหรับมอเตอร์แต่ละตัวสามารถกำหนดได้โดยการรู้ค่า หลายหลากของกระแสเริ่มต้น- ฉันเริ่ม/ฉันชื่อ. หลายหลากของกระแสเริ่มต้นเป็นหนึ่งในคุณสมบัติทางเทคนิคของมอเตอร์ซึ่งสามารถพบได้ในแค็ตตาล็อก เริ่มปัจจุบันกำหนดโดยสูตรต่อไปนี้: I start = I n x (I start/I nom) ตัวอย่างเช่น เมื่อกระแสไฟสตาร์ทของมอเตอร์อยู่ที่ 20 A และกระแสสตาร์ทเป็นทวีคูณเป็น 6 กระแสสตาร์ทคือ 20 x 6 = 120 A
การทราบมูลค่าที่แท้จริงของกระแสสตาร์ทเป็นสิ่งจำเป็นสำหรับการเลือกฟิวส์ ตรวจสอบการทำงานของการปล่อยแม่เหล็กไฟฟ้าระหว่างสตาร์ทเครื่องยนต์เมื่อเลือก เบรกเกอร์วงจรและเพื่อกำหนดขนาดของแรงดันไฟฟ้าที่ตกในเครือข่ายระหว่างการเริ่มต้นระบบ
กระแสไฟเริ่มต้นขนาดใหญ่ซึ่งโดยปกติแล้วเครือข่ายจะไม่ได้รับการออกแบบ ทำให้เกิดแรงดันไฟฟ้าตกอย่างมากในเครือข่าย (รูปที่ 2, b)
หากเราใช้ความต้านทานของสายไฟที่ส่งจากแหล่งกำเนิดไปยังเครื่องยนต์เท่ากับ 0.5 โอห์ม กระแสไฟที่กำหนด I n = 15 A และกระแสเริ่มต้นเท่ากับห้าเท่าของกระแสไฟที่กำหนด จากนั้นแรงดันไฟฟ้าจะสูญเสียในสายไฟที่ เวลาเริ่มต้นจะเป็น 0.5 x 75 + 0, 5 x 75 = 75 V.
ที่ขั้วของมอเตอร์เช่นเดียวกับที่ขั้วของมอเตอร์ไฟฟ้าที่ทำงานในบริเวณใกล้เคียงจะมี 220 - 75 = 145 V แรงดันไฟฟ้าที่ลดลงดังกล่าวอาจทำให้เกิดการเบรกของมอเตอร์ที่ทำงานอยู่ซึ่งจะส่งผลให้กระแสในกระแสไฟเพิ่มขึ้นมากยิ่งขึ้น เครือข่ายและฟิวส์ขาด
ในหลอดไฟฟ้า เมื่อเครื่องยนต์สตาร์ท ความร้อนจะลดลง (ไฟ "กะพริบ") ดังนั้นเมื่อสตาร์ทมอเตอร์ไฟฟ้าจึงพยายามลดกระแสสตาร์ท
เพื่อลดกระแสสตาร์ท สามารถใช้วงจรสตาร์ทมอเตอร์เพื่อสลับขดลวดสเตเตอร์จากสตาร์เป็นเดลต้าได้ในกรณีนี้ แรงดันไฟฟ้าเฟสจะลดลง √ 3 เท่า และกระแสกระชากจะถูกจำกัดตามนั้น หลังจากที่โรเตอร์ถึงความเร็วที่กำหนด ขดลวดสเตเตอร์จะเปลี่ยนเป็นวงจรเดลต้า และแรงดันไฟฟ้าที่พวกมันจะเท่ากับค่าพิกัด โดยปกติแล้วการสลับจะทำโดยอัตโนมัติโดยใช้เวลาหรือรีเลย์ปัจจุบัน
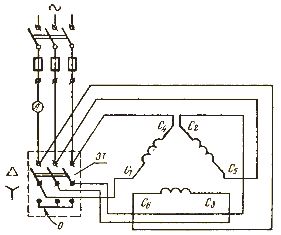
ข้าว. 3. โครงการสตาร์ทมอเตอร์ไฟฟ้าโดยเปลี่ยนขดลวดสเตเตอร์จากดาวเป็นสามเหลี่ยม
แนวคิดของโพสต์นี้เกิดขึ้นหลังจากการร้องเรียนจำนวนมากจากวิศวกรที่ "มีความสามารถสูง" ในหัวข้อที่ว่าสำหรับเครื่องยนต์ที่มีกำลังเช่น 15 kW คุณต้องติดตั้งเครื่องจักรอัตโนมัติไม่ต่ำกว่า 50A เพราะ ระดับปัจจุบันคือ 40A + สำรองสำหรับกระแสเริ่มต้น บลา บลา บลา บลา... นี่เป็นข้อผิดพลาดทั่วไปที่เกิดขึ้นโดยผู้ที่พยายามคำนวณกำลังของมอเตอร์แบบอะซิงโครนัสสามเฟสโดยใช้สูตรกำลังมาตรฐาน I=P\U ในขณะที่ ทั้งความจริงที่ว่ามอเตอร์เป็นแบบสามเฟสหรือความจริงที่ว่ามันมีโคไซน์พีและประสิทธิภาพซึ่งเกือบทุกคนไม่สามารถเข้าใจได้นั้นไม่ได้ถูกนำมาพิจารณา
อย่างไรก็ตามเมื่อติดตั้งมอเตอร์ใหม่คุณไม่จำเป็นต้องนับอะไรเลย ตามกฎแล้วกระแสไฟที่กำหนดสำหรับทั้งสองโหมด (สตาร์ 380 และเดลต้า 220) จะถูกระบุบนแผ่นป้ายพร้อมกับพารามิเตอร์อื่น ๆ ทั้งหมด
แล้ววิธีคำนวณกำลังให้ถูกต้องแบบคร่าว ๆ หรือแม่นยำยิ่งขึ้น มอเตอร์แบบอะซิงโครนัสในสถานการณ์มาตรฐาน?
ขั้นแรก เรามานิยาม "สถานการณ์มาตรฐาน" นี้และสิ่งที่รับประทานเข้าไปกันก่อน
ฉันเรียกสถานการณ์มาตรฐานเมื่อมอเตอร์ที่ออกแบบมาสำหรับ 380\220 สตาร์/เดลต้าเชื่อมต่อกับดาวมาตรฐาน 380 สำหรับทั้งสามเฟส ในอุตสาหกรรมสิ่งนี้เกิดขึ้นบ่อยที่สุดและมักทำให้เกิดคำถามว่าควรติดตั้งเครื่องจักรในสกุลเงินใด เนื่องจากหลายคนรู้สูตรกำลังมาตรฐาน I = P\U และด้วยเหตุผลบางประการ เห็นได้ชัดว่ามาจากการรู้หนังสือที่ยอดเยี่ยมหรือสติปัญญาอันยิ่งใหญ่ ความเศร้าโศกตาม Griboyedov เริ่มเลย โหลดสามเฟสใช้มัน
และตอนนี้ฉันกำลังเปิดเผยความลับ ความลับอันเลวร้าย....
ในการคำนวณการป้องกันของมอเตอร์ 380V พลังงานต่ำที่มีกำลังสูงถึง 30 kW ก็เพียงพอแล้วที่จะคูณกำลังด้วย 2 พอดี นั่นคือ P*2=~In เครื่องยังคงถูกเลือกด้วยพิกัดที่ใกล้เคียงที่สุด ขึ้นไปนั่นคือ 63A สำหรับมอเตอร์ขนาด 30 กิโลวัตต์ที่มีโหลดเพลา เช่น กังหันพัดลมประเภทไซโคลน นี่เป็นวิธีด่วนที่เป็นความลับและแย่มากซึ่งไม่มีในตำราเรียนสำหรับการคำนวณความแรงกระแสของมอเตอร์ 380V อย่างคร่าว ๆ... ทำไมจึงเป็นเช่นนี้ ง่ายมากที่ U=380V สำหรับกำลังไฟฟ้า 1 kW โดยมีกระแสไฟฟ้าประมาณ 2 แอมแปร์ (ใช่แล้ว ตอนนี้ฉันจะถูกนักทฤษฎีที่จำเรื่องประสิทธิภาพและโคไซน์ FI ทุบตีฉัน... เงียบก่อน ข้าพูดไว้สำหรับเครื่องยนต์ LOW-POWER สูงถึง 30 kW และสำหรับกำลังต่ำ เมื่อทราบช่วงรุ่นของเครื่องของเราแล้ว 2 ค่านี้ ไม่อาจนำมาพิจารณาได้ โดยเฉพาะหากภาระบนเพลามีน้อย)
ทีนี้ลองจินตนาการถึงเครื่องยนต์ทั่วไป* พร้อมด้วยพารามิเตอร์ต่อไปนี้:
P=30 กิโลวัตต์
U=380 โวลต์
กระแสไฟที่ป้ายชื่อหมดไป...
คอส φ = 0.85
ประสิทธิภาพ=0.9
จะหาความแข็งแกร่งในปัจจุบันได้อย่างไร? หากเรานับว่าเป็นวิศวกรที่ "ฉลาดมาก" ที่ดื้อรั้น ซึ่งชอบไขปริศนาคำถามนี้เป็นพิเศษในการสัมภาษณ์ ให้คำแนะนำ และเชื่อในตัวเอง เราจะได้ตัวเลขที่ 78.9A หลังจากนั้นผู้จะเป็นวิศวกรจะเริ่มจดจำการหลั่งไหลเข้ามาอย่างรวดเร็ว กระแสน้ำขมวดคิ้วอย่างมีวิจารณญาณและย่นหน้าผากของพวกเขา จากนั้นอย่าลังเลที่จะเรียกร้องให้ติดตั้งเครื่องอย่างน้อย 100A เนื่องจากเครื่องที่ใกล้เคียงที่สุดที่มีค่าระบุ 80A จะล้มลงด้วยความพยายามเพียงเล็กน้อยที่จะเริ่มต้นด้วยกระแสเริ่มต้นที่ยอดเยี่ยม .. . และเป็นเรื่องยากมากที่จะโต้เถียงกับพวกเขาเนื่องจากสิ่งต่อไปนี้ทำให้เกิดพายุแห่งอารมณ์ในคนฉลาด ปัสสาวะและอุจจาระไม่หยุดยั้ง ทำลายรูปแบบ และจมดิ่งลงสู่ความมึนงงลึก ๆ ด้วยความคร่ำครวญและเปลือกโลกโบกมือของมหาวิทยาลัยเหล่านั้นที่พวกเขาเรียนรู้ นับและใช้ชีวิต..
สูตรที่สมบูรณ์ยิ่งขึ้นที่แนะนำสำหรับการใช้งานจะดูแตกต่างออกไปเล็กน้อย
กำลังไฟฟ้าเป็นกิโลวัตต์จะถูกแปลงเป็นวัตต์ โดยที่ 30*1,000=30,000 วัตต์
จากนั้นเราหารวัตต์ด้วยแรงดันไฟฟ้าจากนั้นหารด้วยรากที่สองของ 3 (1.73) (เรามีสามเฟส) และรับความแรงกระแสโดยประมาณซึ่งจำเป็นต้องชี้แจงให้ชัดเจนโดยการหารเพิ่มเติมด้วย cos φ (ตัวประกอบกำลังเพราะ โหลดอุปนัยใดๆ มี And พลังงานปฏิกิริยาถาม) จากนั้นชี้แจงอีกครั้ง โดยหารด้วยประสิทธิภาพหากต้องการ ดังนั้น:
30000W\380V\1.73=45.63 A\0.85=53.6A
มาชี้แจงการคำนวณกันดีกว่า: 53.6A\0.9 = 59.65A (อย่างไรก็ตาม โปรแกรมช่างไฟฟ้าซึ่งคำนวณโดยใช้สูตรที่คล้ายกัน ได้ข้อมูลที่แม่นยำกว่า 59.584 A ซึ่งก็คือ น้อยกว่าการคำนวณตามเวลาของฉันเล็กน้อย... คือการคำนวณค่อนข้างแม่นยำและความคลาดเคลื่อนของหนึ่งในสิบและหนึ่งในร้อยของแอมแปร์ในกรณีของเราไม่ได้รบกวนใครเป็นพิเศษทำไมเขียนไว้ด้านล่าง)
59.65 แอมแปร์เป็นเรื่องบังเอิญที่เกือบจะสมบูรณ์กับการคำนวณคร่าวๆ ครั้งแรก ซึ่งมีความคลาดเคลื่อนเพียง -0.35A ซึ่งไม่มีบทบาทใด ๆ ในการเลือกเบรกเกอร์ในกรณีนี้ แล้วควรเลือกเครื่องไหน??
โดยมีเงื่อนไขว่าภาระบนเพลาไม่มาก เช่น กังหันพัดลมบางประเภท คุณสามารถติดตั้ง VA 47-29 บน 63A จาก IEK หมวด C... ที่พบบ่อยที่สุดได้อย่างปลอดภัย
สำหรับเสียงร้องเกี่ยวกับกระแสไหลเข้า ฉันสามารถตอบได้อย่างปลอดภัยว่าแพ็คเกจ 63A ประเภท B, C, Dทนกระแสไฟได้นานกว่าหนึ่งชั่วโมง 1.13 เท่า และน้อยกว่าหนึ่งชั่วโมง 1.45 เท่า คือถ้าเครื่องบอก 63A ไม่ได้หมายความว่าพอจ่ายไฟถึง 70A มันจะดับทันที... ไม่มีอะไรแบบนั้นครับ โหลดอยู่ที่ 113% (ความแรงของกระแสคือ 71.19A) จะอยู่ได้อย่างน้อยหนึ่งชั่วโมง โดยเฉพาะสำหรับเครื่องจักรอัตโนมัติราคาแพงจาก Legrand\ABB และถึงแม้จะมีความแรงของกระแสอยู่ที่ 145% ของค่าเล็กน้อย = 91.35A ก็รับประกันว่าจะมีอายุการใช้งานยาวนาน เป็นเวลาหลายนาที และในการหมุนเครื่องอะซิงโครนัสและเข้าสู่โหมดปกติ เวลาไม่กี่วินาทีก็เพียงพอแล้ว โดยปกติจะอยู่ที่ 5 ถึง 20 วินาที ในช่วงเวลานี้การระบายความร้อนของเครื่องจะไม่มีเวลาอุ่นเครื่องและปิดโหลด
แน่นอนว่าคนฉลาดคงจะเตือนฉันว่าเครื่องนี้มีการปล่อยแม่เหล็กไฟฟ้าด้วย และมันจะตัดเครื่องยนต์ที่โชคร้ายออกอย่างแน่นอนเมื่อเกิน 63A ... 555 ลงนรกกับคุณและความวิบัติกับคุณ...
ตัวอักษร B, C, D และอื่น ๆ บางตัวในชื่อของเครื่องเป็นเพียงลักษณะเฉพาะของการตั้งค่าการปล่อยแม่เหล็กไฟฟ้าหลายหลากและเท่ากับ
ข - 3...5
ค - 5...10
D - ตาม GOST R - 10...50 ผู้ผลิตส่วนใหญ่อ้างสิทธิ์ในช่วง 10...20
มีอันที่หายากมากขึ้น
กรัม - 6.4...9.6 (KEAZ VM40)
เค - 8...14
แอล - 3.2...4.8 (KEAZ VM40)
ซี - 2...3
นั่นคือรับประกันว่าเครื่องประเภท C 63A จะถูกปิดโดยการปล่อยแม่เหล็กไฟฟ้าในช่วง 315-630A ขึ้นไปเท่านั้นซึ่งจะไม่เกิดขึ้นเมื่อสตาร์ทเครื่องแบบอะซิงโครนัสขนาด 30 กิโลวัตต์ที่ทำงาน
คำถามที่สองที่ถูกต้องตามกฎหมายคือสายไฟใดที่จะใส่กับเครื่องยนต์ของเรา คำตอบคือสายเคเบิลขนาด 4x16 ตารางมิลลิเมตร ซึ่งเพียงพอสำหรับความยาวสูงสุด 50 เมตร สำหรับความยาวที่ยาวกว่านั้น ควรเลือก 25 มม. เนื่องจากการสูญเสีย
ตัวเลขทั้งหมดได้รับการตรวจสอบหลายครั้งโดยฉันเองและโดยการทดลอง ทดสอบโดยใช้ทั้งเครื่องจักรที่เลือกและการวัดความแรงของกระแสไฟฟ้าจริงหลายครั้งโดยใช้แคลมป์กระแสไฟฟ้า
*-หมายเหตุและคำอธิบายเดียว: เครื่องยนต์เก่าของโซเวียตที่ผลิตขึ้นใหม่ที่ใช้งานอาจมีค่าโคไซน์ phi และประสิทธิภาพต่ำกว่า จากนั้นความแรงในปัจจุบันอาจสูงกว่าค่าของการคำนวณคร่าวๆ เล็กน้อย เพียงเลือกเครื่อง 80A ระดับถัดไป คุณเลือกไม่ผิดหรอก!
หมายเหตุที่สอง:
หากต้องการคำนวณความแรงกระแสโดยประมาณของมอเตอร์ที่เชื่อมต่อเป็นรูปสามเหลี่ยมกับเครือข่าย 220 ผ่านตัวเก็บประจุ คุณสามารถใช้กำลังของมอเตอร์ในหน่วยกิโลวัตต์ เช่น 30 KW เท่าเดิมแล้วคูณด้วยประมาณ 3.9 ดังนี้: 30 * 3.9 = 117A
และในการคำนวณตัวเก็บประจุคุณสามารถใช้เว็บไซต์ได้
การแปลง พลังงานไฟฟ้าจลน์ศาสตร์ดำเนินการโดยใช้มอเตอร์ไฟฟ้าประเภทต่างๆ อุปกรณ์เหล่านี้ใช้กันอย่างแพร่หลายในการผลิตสมัยใหม่และในชีวิตประจำวัน ส่วนใหญ่แล้ว มอเตอร์ไฟฟ้าทำหน้าที่เป็นตัวขับเคลื่อนไฟฟ้าสำหรับเครื่องจักรและกลไก และใช้เพื่อให้แน่ใจว่าอุปกรณ์สูบน้ำ ระบบระบายอากาศ รวมถึงหน่วยและอุปกรณ์อื่นๆ อีกมากมาย เนื่องจากการใช้งานที่หลากหลายเช่นนี้ การคำนวณกำลังของมอเตอร์ไฟฟ้าจึงมีความเกี่ยวข้องเป็นพิเศษ เพื่อวัตถุประสงค์เหล่านี้ จึงมีการพัฒนาวิธีการต่างๆ มากมายที่ช่วยให้สามารถคำนวณโดยสัมพันธ์กับสภาพการทำงานเฉพาะได้
มอเตอร์ไฟฟ้าประเภทหลัก
มอเตอร์ไฟฟ้ามีหลายประเภทและการดัดแปลง แต่ละคนมีพลังและพารามิเตอร์อื่น ๆ ของตัวเอง
การจำแนกประเภทหลักแบ่งอุปกรณ์เหล่านี้ออกเป็นมอเตอร์กระแสตรงและกระแสตรง เครื่องปรับอากาศ- ตัวเลือกแรกใช้บ่อยน้อยกว่ามากเนื่องจากการดำเนินการต้องมีแหล่งที่มา ดี.ซีหรืออุปกรณ์ที่แปลง แรงดันไฟฟ้ากระแสสลับให้เป็นกระแสตรง การปฏิบัติตามเงื่อนไขนี้ในการผลิตสมัยใหม่จะต้องใช้ต้นทุนเพิ่มเติมจำนวนมาก
แต่ถึงแม้จะมีข้อเสียที่สำคัญ มอเตอร์กระแสตรงก็มีแรงบิดเริ่มต้นที่สูงและทำงานได้อย่างเสถียรแม้ที่การใช้งานเกินพิกัดสูง เนื่องจากคุณสมบัติเหล่านี้ หน่วยเหล่านี้จึงถูกนำมาใช้กันอย่างแพร่หลายในการขนส่งไฟฟ้า ในอุตสาหกรรมโลหะและเครื่องมือกล
อย่างไรก็ตาม อุปกรณ์ที่ทันสมัยส่วนใหญ่ทำงานบนมอเตอร์กระแสสลับ การทำงานของอุปกรณ์เหล่านี้ขึ้นอยู่กับสื่อนำไฟฟ้าที่สร้างขึ้นภายใน สนามแม่เหล็กถูกสร้างขึ้นโดยใช้ขดลวดที่ไหลรอบกระแสน้ำหรือใช้แม่เหล็กถาวร มอเตอร์ไฟฟ้าที่ทำงานด้วยไฟฟ้ากระแสสลับสามารถ...
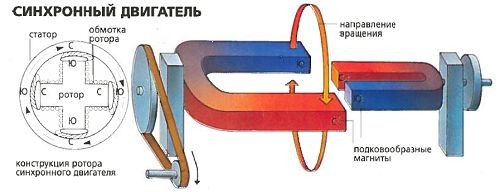
การใช้มอเตอร์ไฟฟ้าแบบซิงโครนัสนั้นเกิดขึ้นในอุปกรณ์ที่ต้องการความเร็วในการหมุนคงที่ ได้แก่เครื่องกำเนิดไฟฟ้ากระแสตรง ปั๊ม คอมเพรสเซอร์ และอุปกรณ์ติดตั้งอื่นๆ ที่คล้ายคลึงกัน รุ่นต่างๆ มีลักษณะทางเทคนิคที่แตกต่างกัน ตัวอย่างเช่นความเร็วในการหมุนอาจอยู่ในช่วง 125-1,000 รอบต่อนาทีและกำลังถึง 10,000 กิโลวัตต์
การออกแบบจำนวนมากมีการพันขดลวดแบบลัดวงจรบนโรเตอร์ ด้วยความช่วยเหลือหากจำเป็นจะมีการสตาร์ทแบบอะซิงโครนัสหลังจากนั้นมอเตอร์ซิงโครนัสยังคงทำงานตามปกติเพื่อลดการสูญเสียพลังงานไฟฟ้า เครื่องยนต์เหล่านี้มีขนาดเล็กและมีประสิทธิภาพสูง
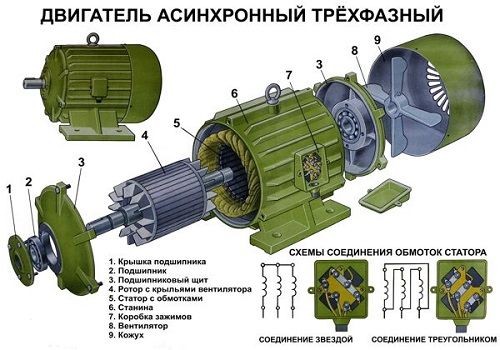
มอเตอร์ไฟฟ้ากระแสสลับแบบอะซิงโครนัสแพร่หลายมากขึ้นในภาคการผลิต มีความเร็วในการหมุนที่สูงมาก สนามแม่เหล็กเกินกว่าความเร็วการหมุนของโรเตอร์อย่างมาก ข้อเสียเปรียบที่สำคัญของอุปกรณ์เหล่านี้คือประสิทธิภาพลดลงเหลือ 30-50% ของค่าปกติที่โหลดต่ำ นอกจากนี้ในระหว่างการสตาร์ท พารามิเตอร์ปัจจุบันจะมีค่ามากกว่าตัวบ่งชี้การทำงานหลายเท่า ปัญหาเหล่านี้จะหมดไปโดยใช้ตัวแปลงความถี่และอุปกรณ์ เริ่มนุ่มนวล.
มอเตอร์แบบอะซิงโครนัสถูกนำมาใช้ในโรงงานที่จำเป็นต้องเปิดและปิดอุปกรณ์บ่อยครั้ง เช่น ในลิฟต์ กว้าน และอุปกรณ์อื่นๆ
การคำนวณกำลังมอเตอร์ไฟฟ้าสำหรับปั๊ม
การเลือกมอเตอร์ไฟฟ้าให้เหมาะกับ หน่วยสูบน้ำขึ้นอยู่กับเงื่อนไขเฉพาะ โดยหลักๆ แล้วขึ้นอยู่กับแผนการจ่ายน้ำ ในกรณีส่วนใหญ่ น้ำจะถูกจ่ายโดยใช้ถังเก็บน้ำหรือหม้อต้มน้ำ ปั๊มหอยโข่งที่มีมอเตอร์อะซิงโครนัสใช้ในการขับเคลื่อนทั้งระบบ
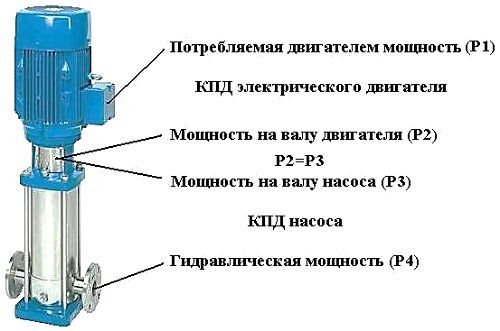
กำลังเลือกปั๊มที่เหมาะสมที่สุดขึ้นอยู่กับความจำเป็นในการจ่ายของเหลวและแรงดัน อัตราการไหลของปั๊ม QH วัดเป็นลิตรที่ส่งต่อชั่วโมง และกำหนดเป็นลิตร/ชม. พารามิเตอร์นี้กำหนดโดยสูตรต่อไปนี้: Qn = Qmaxch = (kch x kday x Qavg.day) / (24 η) โดยที่ Qmaxch คืออัตราการไหลของน้ำสูงสุดรายชั่วโมงที่เป็นไปได้, l/h, kch คือสัมประสิทธิ์ของความไม่สม่ำเสมอของ การไหลรายชั่วโมง kday คือค่าสัมประสิทธิ์ของการไหลรายวันที่ไม่สม่ำเสมอ (1.1 - 1.3), η - ประสิทธิภาพของหน่วยสูบน้ำโดยคำนึงถึงการสูญเสียน้ำ), Qav.day - มูลค่าการไหลของน้ำเฉลี่ยรายวัน (ลิตร/วัน)
แรงดันน้ำที่เหมาะสมควรให้แน่ใจว่ามีน้ำจ่ายไปยังตำแหน่งที่ระบุ โดยขึ้นอยู่กับแรงดันที่ต้องการ พารามิเตอร์ที่ต้องการของแรงดันปั๊ม (Hntr) ขึ้นอยู่กับความสูงในการดูด (Hvs) และความสูงการปล่อย (Nng) ซึ่งร่วมกันกำหนดตัวบ่งชี้แรงดันสถิต (Hs) การสูญเสียในท่อ (Hp) และความแตกต่างของแรงดันระหว่าง ระดับบน (Pvu) และระดับล่าง (Pnu)
จากข้อเท็จจริงที่ว่าค่าความดันจะเท่ากับ H = P/ρg โดยที่ P คือความดัน (Pa) ρ คือความหนาแน่นของของเหลว (kg/m3) g = 9.8 m/s2 คือความเร่งของอิสระ ฤดูใบไม้ร่วง g คือน้ำหนักของเหลวจำเพาะ (kg/m 3) จะได้สูตรต่อไปนี้: Hntr = Hc + Hp + (1/ρ) x (Pvu - Rnu)
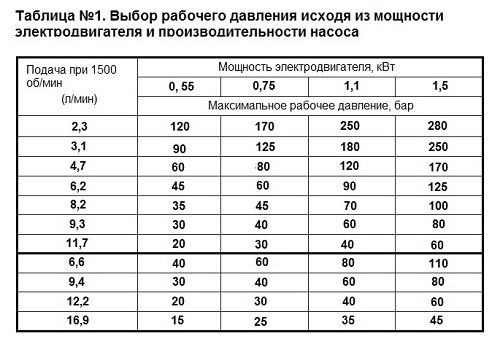
หลังจากคำนวณการไหลของน้ำและแรงดันจากแค็ตตาล็อก คุณสามารถเลือกปั๊มที่มีพารามิเตอร์ที่เหมาะสมที่สุดได้แล้ว เพื่อไม่ให้เข้าใจผิดกับกำลังของมอเตอร์ไฟฟ้าต้องพิจารณาโดยใช้สูตร: Pmot = (kз x ρ x Qн x Нн) / (ηн x ηп) โดยที่ k คือปัจจัยด้านความปลอดภัย ขึ้นอยู่กับกำลังของมอเตอร์ปั๊ม และมีค่าเท่ากับ 1.05 - 1.7 ตัวบ่งชี้นี้คำนึงถึงการรั่วไหลของน้ำที่อาจเกิดขึ้นจากท่อเนื่องจากการเชื่อมต่อที่หลวม ท่อแตก และปัจจัยอื่น ๆ ดังนั้นมอเตอร์ไฟฟ้าสำหรับปั๊มจะต้องมีพลังงานสำรองอยู่บ้าง ยิ่งมีกำลังสูงเท่าใด ค่าปัจจัยด้านความปลอดภัยก็จะยิ่งต่ำลงเท่านั้น
ตัวอย่างเช่นด้วยกำลังมอเตอร์ไฟฟ้าของปั๊ม 2 kW - kz = 1.5, 3.0 kW - kz = 1.33, 5 kW - kz = 1.2 ด้วยกำลังมากกว่า 10 kW - kz = 1.05 - 1.1 . พารามิเตอร์อื่น ๆ หมายถึง: ηп - ประสิทธิภาพการส่งผ่าน (การส่งผ่านโดยตรง - 1.0, สายพาน V - 0.98, ฟัน - 0.97, สายพานแบน - 0.95), ηн - ประสิทธิภาพของปั๊มลูกสูบ 0.7 - 0.9, แรงเหวี่ยง 0 .4 - 0.8, น้ำวน 0.25 - 0.5.
การคำนวณสูตรกำลังเครื่องยนต์ของคอมเพรสเซอร์
เมื่อเลือกมอเตอร์ไฟฟ้าที่เหมาะสมที่สุดสำหรับการทำงานของคอมเพรสเซอร์โดยเฉพาะจำเป็นต้องคำนึงถึงการทำงานในระยะยาวของกลไกนี้และภาระคงที่ด้วย การคำนวณกำลังเครื่องยนต์ที่ต้องการ R dv ดำเนินการตามกำลังบนเพลาของกลไกหลัก ในกรณีนี้ควรคำนึงถึงความสูญเสียที่เกิดขึ้นในการเชื่อมโยงระหว่างกลางของการส่งกำลังทางกลด้วย

ปัจจัยเพิ่มเติมคือกำลังการผลิต วัตถุประสงค์ และลักษณะของการผลิตที่จะใช้อุปกรณ์คอมเพรสเซอร์ สิ่งเหล่านี้มีผลกระทบและอุปกรณ์อาจต้องมีการปรับเปลี่ยนเล็กน้อยแต่อย่างต่อเนื่องเพื่อรักษาประสิทธิภาพที่เหมาะสม
กำลังของเครื่องยนต์สามารถกำหนดได้โดยใช้สูตร:  ซึ่ง:
ซึ่ง:
- Q คือค่าประสิทธิภาพหรือการไหลของคอมเพรสเซอร์ (m 3 /s)
- เอ - งานเพื่อทำการบีบอัด (J/m 3)
- ηк - ประสิทธิภาพของตัวบ่งชี้ (0.6-0.8) เพื่อคำนึงถึงการสูญเสียพลังงานระหว่างการอัดอากาศจริง
- ηп - ประสิทธิภาพเชิงกล (0.9-0.95) โดยคำนึงถึงการส่งผ่านระหว่างเครื่องยนต์และคอมเพรสเซอร์
- kz - ปัจจัยด้านความปลอดภัย (1.05-1.15) ที่ต้องคำนึงถึงปัจจัยที่ไม่สามารถคำนวณได้
งาน A คำนวณโดยใช้สูตรแยกต่างหาก: A = (Au + Aa)/2 โดยที่ Au และ Aa แสดงถึงการบีบอัดอุณหภูมิคงที่และอะเดียแบติก ตามลำดับ
มูลค่าของงานที่ต้องทำก่อนที่แรงกดดันที่ต้องการจะปรากฏขึ้นสามารถกำหนดได้โดยใช้ตาราง:
|
ร 2, 10 5 ป |
||||||||
|
A, 10 -3 J/m 3 |
การทำงานของคอมเพรสเซอร์โดยทั่วไปมีลักษณะการทำงานที่ต่อเนื่อง ตามกฎแล้วไม่มีไดรฟ์ไฟฟ้าแบบพลิกกลับได้ ดังนั้นส่วนใหญ่ ตัวเลือกที่ดีที่สุดเพื่อให้มั่นใจว่าการทำงานปกติของคอมเพรสเซอร์จะเป็นมอเตอร์ไฟฟ้าแบบซิงโครนัส
สูตรคำนวณสำหรับแฟนบอล
พัดลมมีการใช้กันอย่างแพร่หลายในหลากหลายสาขา อุปกรณ์เอนกประสงค์ทำงานในอากาศบริสุทธิ์ที่อุณหภูมิต่ำกว่า 80 0 อากาศที่มีอุณหภูมิสูงกว่าจะถูกเคลื่อนย้ายโดยใช้พัดลมทนความร้อนพิเศษ หากคุณต้องทำงานในสภาพแวดล้อมที่รุนแรงหรือเกิดการระเบิด ในกรณีเหล่านี้ จะใช้อุปกรณ์ป้องกันการกัดกร่อนและป้องกันการระเบิด

ตามหลักการทำงานชุดพัดลมอาจเป็นแบบแรงเหวี่ยงหรือแนวรัศมีและแนวแกน ขึ้นอยู่กับการออกแบบ พวกเขาพัฒนาความดันตั้งแต่ 1,000 ถึง 15,000 Pa ดังนั้นกำลังที่ต้องใช้ในการขับเคลื่อนพัดลมจึงคำนวณตามแรงดันที่ต้องสร้าง
เพื่อจุดประสงค์นี้ มีการใช้สูตร: Nв=Hв·Qв/1000·efficiency โดยที่ Nв คือกำลังที่จำเป็นสำหรับตัวขับเคลื่อน (kW), Hв คือแรงดันที่สร้างโดยพัดลม (Pa), Qв คือปริมาตรที่เคลื่อนที่ ของอากาศ (m 3 /s) ประสิทธิภาพ - ปัจจัยด้านประสิทธิภาพ
ในการคำนวณกำลังของมอเตอร์ไฟฟ้า จะใช้สูตรนี้: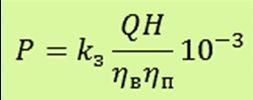 โดยที่ค่าพารามิเตอร์จะเป็นดังนี้:
โดยที่ค่าพารามิเตอร์จะเป็นดังนี้:
- Q - ประสิทธิภาพของหน่วย
- N - แรงดันทางออก;
- ηв - ประสิทธิภาพของพัดลม
- ηп - ประสิทธิภาพการส่งผ่าน;
- kz - ปัจจัยด้านความปลอดภัย ขึ้นอยู่กับกำลังของมอเตอร์ไฟฟ้า ด้วยกำลังสูงสุด 1 kW, c = 2; จาก 1 ถึง 2 กิโลวัตต์ถึง z = 1.5; ที่ 5 kW ขึ้นไปถึง z = 1.1-1.2
สูตรนี้ช่วยให้คุณคำนวณกำลังของมอเตอร์ไฟฟ้าสำหรับพัดลมแบบแรงเหวี่ยงและแนวแกน สำหรับโครงสร้างแบบแรงเหวี่ยงประสิทธิภาพคือ 0.4-0.7 และสำหรับแกน - 0.5-0.85 ลักษณะการออกแบบอื่นๆ มีอยู่ในแค็ตตาล็อกพิเศษสำหรับมอเตอร์ไฟฟ้าทุกประเภท
พลังงานสำรองไม่ควรมากเกินไป หากมีขนาดใหญ่เกินไปประสิทธิภาพของไดรฟ์จะลดลงอย่างเห็นได้ชัด นอกจากนี้ มอเตอร์ AC อาจพบว่าค่ากำลังไฟฟ้าลดลง
การคำนวณกระแสสตาร์ทมอเตอร์
เมื่อมอเตอร์ไฟฟ้าสตาร์ท เพลาจะยังคงอยู่กับที่ เพื่อให้เริ่มคลายออกจำเป็นต้องใช้แรงที่มากกว่าค่าที่ระบุอย่างมีนัยสำคัญ ในเรื่องนี้กระแสเริ่มต้นยังเกินค่าที่กำหนดด้วย ในกระบวนการคลี่คลายเพลากระแสไฟฟ้าจะลดลงอย่างค่อยเป็นค่อยไป

อิทธิพลของกระแสไหลเข้าส่งผลเสียต่อการทำงานของอุปกรณ์ สาเหตุหลักมาจากแรงดันไฟฟ้าตกกะทันหัน เพื่อลดผลกระทบด้านลบให้ใช้ วิธีต่างๆ- ในระหว่างการเร่งความเร็ว วงจรมอเตอร์ไฟฟ้าจะเปลี่ยนจากสตาร์เป็นเดลต้าโดยใช้ เครื่องแปลงความถี่และซอฟต์สตาร์ทแบบอิเล็กทรอนิกส์
ขั้นแรกให้คำนวณกระแสไฟที่กำหนดของมอเตอร์ตามประเภทและกำลังไฟพิกัด สำหรับอุปกรณ์ DC สูตรจะมีลักษณะดังนี้:
สำหรับมอเตอร์ไฟฟ้ากระแสสลับ กระแสไฟที่กำหนดจะถูกกำหนดโดยสูตรอื่น:

พารามิเตอร์ทั้งหมดมีสัญลักษณ์ที่สอดคล้องกัน:
- RN - ค่าของกำลังไฟของเครื่องยนต์
- UH คือค่าของแรงดันไฟฟ้าที่กำหนดของมอเตอร์
- ηH-ประสิทธิภาพของมอเตอร์ไฟฟ้า
- cosfH - สอดคล้องกับปัจจัยกำลังของเครื่องยนต์
หลังจากคำนวณกระแสไฟที่กำหนดแล้วคุณสามารถคำนวณค่าปัจจุบันเริ่มต้นได้โดยใช้สูตร:  ซึ่ง:
ซึ่ง:
- ฉัน- ค่าเล็กน้อยปัจจุบันที่กำหนดไว้ก่อนหน้านี้
- Kp คืออัตราส่วนของกระแสตรงต่อค่าระบุ
มูลค่ากระแสเริ่มต้นจะถูกคำนวณสำหรับมอเตอร์แต่ละตัวที่รวมอยู่ใน วงจรไฟฟ้า- ตามขนาดของมัน เซอร์กิตเบรกเกอร์ถูกเลือกเพื่อให้การป้องกันวงจรทั้งหมด
โหมดการทำงานของมอเตอร์ไฟฟ้า
โหลดของมอเตอร์ไฟฟ้าถูกกำหนดโดยโหมดการทำงาน มันอาจจะยังคงไม่เปลี่ยนแปลงหรือเปลี่ยนแปลงขึ้นอยู่กับสภาพการใช้งาน เมื่อเลือกเครื่องยนต์ต้องคำนึงถึงลักษณะและความสำคัญของภาระที่คาดหวังด้วย เมื่อคำนึงถึงปัจจัยนี้แล้ว จะคำนวณกำลังของมอเตอร์ไฟฟ้า
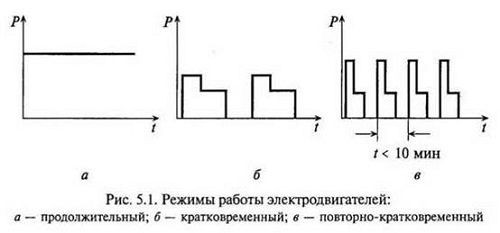
โหมดการทำงานของมอเตอร์ไฟฟ้า:
- S1 - โหมดต่อเนื่อง โหลดไม่เปลี่ยนแปลงตลอดระยะเวลาการทำงาน อุณหภูมิเครื่องยนต์ถึงค่าที่ตั้งไว้
- S2 - โหมดระยะสั้น ในกรณีนี้ระหว่างการทำงานอุณหภูมิจะไม่มีเวลาถึงค่าที่ต้องการ เมื่อดับเครื่องยนต์ เครื่องยนต์จะเย็นลงจนถึงอุณหภูมิแวดล้อม
- S3 - โหมดระยะสั้นเป็นระยะ ในระหว่างการทำงานของเครื่องยนต์จะมีการปิดเครื่องเป็นระยะ ในระหว่างช่วงเวลาดังกล่าว อุณหภูมิของเครื่องยนต์อาจไม่ถึงค่าที่ต้องการหรือเท่ากับอุณหภูมิภายใน สิ่งแวดล้อม- เมื่อคำนวณเครื่องยนต์รวมถึงกำลัง การหยุดชั่วคราวและการสูญเสียทั้งหมดและระยะเวลาจะถูกนำมาพิจารณาด้วย หนึ่งใน เกณฑ์ที่สำคัญเมื่อเลือกหน่วย จะพิจารณาจำนวนการเริ่มต้นที่อนุญาตในช่วงระยะเวลาหนึ่ง
- S4 - โหมดระยะสั้นเป็นระยะโดยมีการสตาร์ทบ่อยครั้ง
- S5 - โหมดระยะสั้นเป็นระยะพร้อมระบบเบรกไฟฟ้า ทั้งโหมด S4 และ S5 ทำงานเหมือนกับ S3
- S6 - โหมดต่อเนื่องเป็นระยะพร้อมโหลดระยะสั้น เครื่องยนต์ทำงานภายใต้ภาระซึ่งสลับกับรอบเดินเบา
- S7 - โหมดต่อเนื่องเป็นระยะพร้อมระบบเบรกไฟฟ้า
- S8 - โหมดต่อเนื่องเป็นระยะซึ่งความเร็วในการโหลดและการหมุนจะเปลี่ยนไปพร้อมกัน
- โหมด S9 เมื่อความเร็วในการโหลดและการหมุนไม่เปลี่ยนแปลงเป็นระยะ
ภาระบนเพลาก็น้อยลง เริ่มต้นปัจจุบัน- หากมีเครื่องหมาย 13.8/8 A หมายความว่าเมื่อมอเตอร์เชื่อมต่อกับเครือข่าย 220 V และโหลดที่กำหนด กระแสไฟฟ้าของมอเตอร์จะเท่ากับ 13.8 A เมื่อเชื่อมต่อกับเครือข่าย 380 V กระแสไฟฟ้าจะเป็น 8 A ดังนั้นความเท่าเทียมกันของกำลังจึงถูกต้อง: √3 x 380 x 8 = √3 x 220 x 13.8
เมื่อทราบกำลังไฟพิกัดของมอเตอร์แล้ว กระแสไฟฟ้าที่กำหนดจะถูกกำหนด เมื่อเครื่องยนต์เชื่อมต่อกับเครือข่ายจำหน่ายไฟสามเฟส 380 โวลต์ จัดอันดับปัจจุบันคำนวณดังนี้:
ใน = Pн/(√3Uн x сosφ), kA
โดยที่ Pn คือกำลังพิกัดของเครื่องยนต์, kW, Un คือแรงดันไฟฟ้าเครือข่าย, kV (0.38 kV) ตัวประกอบกำลัง (cosφ) - ค่าป้ายชื่อเครื่องยนต์
ข้าว. 1. พาสปอร์ตมอเตอร์ไฟฟ้า
หากไม่ทราบค่าตัวประกอบกำลังของมอเตอร์ กระแสไฟฟ้าที่ได้รับการจัดอันดับโดยมีข้อผิดพลาดเล็กน้อยจะถูกกำหนดโดยอัตราส่วน "สองแอมแปร์ต่อกิโลวัตต์" เช่น หากกำลังไฟพิกัดของมอเตอร์คือ 10 kW กระแสไฟฟ้าที่ใช้จากเครือข่ายจะอยู่ที่ประมาณ 20 A
สำหรับมอเตอร์ที่กล่าวถึงในรูป อัตราส่วนนี้ก็ยังคงอยู่ (3.4 A µs 2 x 1.5) ค่ากระแสที่แม่นยำยิ่งขึ้นเมื่อใช้อัตราส่วนนี้จะได้รับด้วยกำลังมอเตอร์ไฟฟ้าตั้งแต่ 3 กิโลวัตต์ขึ้นไป
เมื่อมอเตอร์ไฟฟ้าไม่ทำงาน กระแสไฟฟ้าเล็กน้อยจะถูกใช้จากเครือข่าย (กระแสไฟฟ้าที่ไม่มีโหลด) เมื่อโหลดเพิ่มขึ้น กระแสก็จะเพิ่มขึ้นด้วย กับ กระแสที่เพิ่มขึ้นความร้อนของขดลวดเพิ่มขึ้น การโอเวอร์โหลดขนาดใหญ่จะทำให้ขดลวดมอเตอร์ร้อนเกินไป และอาจเสี่ยงต่อความล้มเหลวของมอเตอร์ไฟฟ้า
เมื่อสตาร์ทจากเครือข่าย มอเตอร์ไฟฟ้าจะใช้ Istart ซึ่งสูงกว่าค่าพิกัด 3 ถึง 8 เท่า ลักษณะของการเปลี่ยนแปลงปัจจุบันจะแสดงบนกราฟ (รูปที่ 2, a)
ข้าว. 2. ลักษณะของการเปลี่ยนแปลงกระแสไฟฟ้าที่ใช้โดยมอเตอร์ไฟฟ้าจากเครือข่าย (a) และผลกระทบของกระแสสูงต่อความผันผวนของแรงดันไฟฟ้าในเครือข่าย (b)
แท้จริง เริ่มต้นมูลค่าปัจจุบันสำหรับมอเตอร์ไฟฟ้า จะถูกกำหนดโดยทราบขนาดของกระแสหลายหลากเริ่มต้น - Istart/Inom เริ่มต้นหลายหลากปัจจุบัน - ข้อกำหนดทางเทคนิคเครื่องยนต์เป็นที่รู้จักจากแค็ตตาล็อก เริ่มปัจจุบันคำนวณตามสูตร: I start = Ix x (อิสตาร์ต/อิโนม)
เข้าใจถึงขนาดที่แท้จริง เริ่มต้นปัจจุบันจำเป็นสำหรับการเลือกฟิวส์, ตรวจสอบการเปิดใช้งานการปล่อยแม่เหล็กไฟฟ้าในระหว่างการสตาร์ทเครื่องยนต์, เมื่อเลือกเบรกเกอร์วงจรและสำหรับการคำนวณขนาดของแรงดันไฟฟ้าตกในเครือข่ายระหว่างการเริ่มต้นระบบ
ตัวเรียกใช้งานที่ยอดเยี่ยมกระแสไฟฟ้าทำให้เกิดแรงดันไฟฟ้าตกอย่างมากในเครือข่าย (รูปที่ 2, b)
หากเรานำความต้านทานไฟฟ้าของสายไฟที่วางจากแหล่งกำเนิดไปยังมอเตอร์ไฟฟ้าเท่ากับ 0.5 โอห์ม, กระแสไฟที่กำหนด In = 15 A และ Ip เท่ากับห้าเท่าของกระแสไฟฟ้าที่กำหนด, การสูญเสียแรงดันไฟฟ้าในสายไฟระหว่างการเริ่มต้นจะเป็น 0.5 x 75 + 0.5 x 75 = 75 โวลต์
ที่ขั้วของมอเตอร์ไฟฟ้าเช่นเดียวกับที่ขั้วของมอเตอร์ไฟฟ้าที่ทำงานใกล้เคียงแรงดันไฟฟ้าจะอยู่ที่ 220 - 75 = 145 V แรงดันไฟฟ้าที่ลดลงนี้ทำให้เกิดการเบรกของมอเตอร์ไฟฟ้าที่ทำงานซึ่งมีผลมากยิ่งขึ้น เพิ่มขึ้นในปัจจุบันในเครือข่ายและความล้มเหลวของฟิวส์
ในหลอดไฟฟ้า เมื่อมอเตอร์ไฟฟ้าสตาร์ท ความเข้มจะลดลง (ไฟ "กะพริบ") ดังนั้นเมื่อเปิดมอเตอร์ไฟฟ้าจึงมักจะ ลดกระแสเริ่มต้น.
สำหรับ ลดกระแสเริ่มต้นวงจรสตาร์ทมอเตอร์ไฟฟ้าใช้ในการสลับขดลวดสเตเตอร์จากดาวเป็นสามเหลี่ยม
ข้าว. 3. โครงการสตาร์ทมอเตอร์ไฟฟ้าโดยเปลี่ยนขดลวดสเตเตอร์จากสตาร์เป็นเดลต้า
เป็นสิ่งสำคัญพื้นฐานที่ไม่สามารถเปิดเครื่องยนต์ทุกเครื่องได้ตามรูปแบบนี้ มอเตอร์อะซิงโครนัสแบบแพร่หลายที่มีแรงดันไฟฟ้าในการทำงาน 220/380 V รวมถึงมอเตอร์ที่แสดงในรูปที่ 1 จะล้มเหลวเมื่อเปิดสวิตช์ตามวงจรนี้
สำหรับ ลดกระแสเริ่มต้นมอเตอร์ไฟฟ้าใช้ซอฟต์สตาร์ทเตอร์ที่ใช้โปรเซสเซอร์พิเศษอย่างแรง (ซอฟต์สตาร์ทเตอร์)
มหาวิทยาลัยแห่งรัฐซูมี
การคำนวณและการปฏิบัติ
งาน #1
"การคำนวณมอเตอร์อะซิงโครนัสสามเฟส
เอซี"
ในหัวข้อ "วิศวกรรมไฟฟ้า"
กลุ่มเอ็มวี-81
ตัวเลือก 162
อาจารย์ปุซโก I.D.
จากข้อมูลของมอเตอร์อะซิงโครนัส 3 เฟสและแผนภาพการเชื่อมต่อที่กำหนดของขดลวดสเตเตอร์ ให้กำหนด:
1. แรงดันไฟฟ้าของสาย วงจรสามเฟส U l และความถี่การหมุนแบบซิงโครนัสของสนามสเตเตอร์ n 0, จัดอันดับ n N และวิกฤต n ความถี่การหมุนของโรเตอร์ KR, กำลังไฟพิกัด P 1 ชื่อที่ใช้โดยเครื่องยนต์จากเครือข่าย, จัดอันดับและกระแสเริ่มต้นของเครื่องยนต์ I NOM และ I PUS, อัตราแรงบิดสูงสุดของเครื่องยนต์ M NOM และ M MAX
2. เขียนกราฟเส้นโค้งการพึ่งพา M(S) ที่ UL = const แล้วหา
ความหลากหลาย แรงบิดเริ่มต้น K p = M เริ่มต้น / ชื่อ M
3. สร้างคุณลักษณะทางกล n 2 =f(M) ที่ U C =const และกำหนดช่วงความเร็วของโรเตอร์ที่ทำให้เครื่องยนต์ทำงานได้เสถียร
4. สร้างคุณลักษณะ M(S) และ n 2 =f(M) สำหรับ U 1 =0.9U C =const
ข้อมูลเริ่มต้น:
|
แผนภาพการเชื่อมต่อ |
ลิตร ม = ม สูงสุด / |
ม. 1 =ฉันเริ่ม /ฉันชื่อ |
|||||
|
โกล-นิค |
ส่วนการคำนวณ
1. เมื่อเชื่อมต่อกันด้วยรูปสามเหลี่ยม แรงดันไฟฟ้าของสายคือ 220 โวลต์
2. ความถี่การหมุนแบบซิงโครนัสของสนามสเตเตอร์:
3. ความเร็วโรเตอร์ที่กำหนด:
4. สลิปที่สำคัญ:
5. ความเร็วโรเตอร์ที่สำคัญ:
6. กำลังไฟที่ใช้จากเครือข่าย:
7. จัดอันดับปัจจุบันเครื่องยนต์:
9. มอเตอร์สตาร์ทปัจจุบัน:
10. แรงบิดสูงสุด:
11. แรงบิดสูงสุด:
12. แรงบิดเริ่มต้น:
13. แรงบิดสตาร์ทหลายหลาก:

ม |
ม |
|||||||||||