มอเตอร์ไฟฟ้าเป็นกลไกที่ทำหน้าที่แปลงพลังงานไฟฟ้าให้เป็นพลังงานกล หลักการทำงานของมอเตอร์ไฟฟ้าเป็นไปตามกฎหมาย การเหนี่ยวนำแม่เหล็กไฟฟ้า- โดยทั่วไป มอเตอร์ไฟฟ้าประกอบด้วยชิ้นส่วนที่อยู่นิ่ง (สเตเตอร์) และโรเตอร์ (หรือกระดอง) ซึ่งจะสร้างสนามแม่เหล็กที่อยู่นิ่งหรือหมุนได้ มอเตอร์ไฟฟ้ามีหลายประเภทและการดัดแปลง มีการใช้กันอย่างแพร่หลายในกิจกรรมของมนุษย์หลายสาขา และเป็นหนึ่งในองค์ประกอบหลักในกลไกและการขับเคลื่อนเพื่อวัตถุประสงค์ที่หลากหลาย ประสิทธิภาพการผลิตขึ้นอยู่กับลักษณะของมอเตอร์ไฟฟ้าโดยตรง
การจำแนกประเภทของมอเตอร์ไฟฟ้า
ส่วนประกอบหลักที่ประกอบด้วย มอเตอร์ไฟฟ้า คือสเตเตอร์และโรเตอร์ โรเตอร์เป็นส่วนหนึ่งของเครื่องยนต์ที่หมุน และสเตเตอร์เป็นส่วนที่ยังคงอยู่กับที่ หลักการทำงานของมอเตอร์ไฟฟ้าอยู่ที่ปฏิกิริยาของการหมุน สนามแม่เหล็กสร้างขึ้นโดยขดลวดสเตเตอร์และกระแสไฟฟ้าที่อยู่ในขดลวดโรเตอร์แบบปิด กระบวนการนี้เริ่มต้นการหมุนของโรเตอร์ในทิศทางของสนาม
มอเตอร์ไฟฟ้าประเภทหลัก:
- เครื่องยนต์ เครื่องปรับอากาศ;
- เครื่องยนต์ ดี.ซี;
- มอเตอร์หลายเฟส
- มอเตอร์เฟสเดียว;
- มอเตอร์วาล์ว
- สเต็ปเปอร์มอเตอร์;
- มอเตอร์สับเปลี่ยนสากล
หากเราพูดถึงมอเตอร์ไฟฟ้าอย่างเช่น มอเตอร์ไฟฟ้าแบบอะซิงโครนัสจากนั้นพวกมันก็อยู่ในประเภทของมอเตอร์ AC เครื่องยนต์ดังกล่าวก็เป็นเช่นนั้น มอเตอร์ไฟฟ้าเฟสเดียว ทั้งแบบสองและสามเฟส ในมอเตอร์ไฟฟ้าแบบอะซิงโครนัส ความถี่ของกระแสสลับในขดลวดไม่ตรงกับความเร็วของโรเตอร์ กระบวนการทำงานของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสนั้นมั่นใจได้จากความแตกต่างของเวลาในการสร้างสนามแม่เหล็กของสเตเตอร์และโรเตอร์ ด้วยเหตุนี้การหมุนของโรเตอร์จึงล่าช้าเมื่อเทียบกับสนามสเตเตอร์ ซื้อมอเตอร์ไฟฟ้า ประเภทอะซิงโครนัสเป็นไปได้สำหรับเครื่องจักรที่ไม่ต้องการเงื่อนไขการทำงานพิเศษสำหรับกลไกสตาร์ท
ประเภทของมอเตอร์ไฟฟ้าตามระดับการป้องกันจากสภาพแวดล้อมภายนอก:
- ป้องกันการระเบิด;
- ได้รับการคุ้มครอง;
- ปิด.
มอเตอร์ไฟฟ้าป้องกันการระเบิด มีโครงที่ทนทานซึ่งหากเครื่องยนต์ระเบิดจะป้องกันความเสียหายต่อส่วนอื่น ๆ ทั้งหมดของกลไกและป้องกันไฟไหม้
มอเตอร์ที่ได้รับการป้องกัน ในระหว่างการดำเนินการจะปิดด้วยแผ่นพับและตาข่ายพิเศษที่ป้องกันกลไกจากการเข้าไปของวัตถุแปลกปลอม ใช้ในสภาพแวดล้อมที่ไม่มี ความชื้นสูงอากาศและสิ่งสกปรกจากก๊าซ ฝุ่น ควัน และสารเคมี
มอเตอร์ไฟฟ้าแบบปิด มีเปลือกพิเศษป้องกันการแทรกซึมของฝุ่น ก๊าซ ความชื้น รวมถึงสารและองค์ประกอบอื่นๆ ที่อาจก่อให้เกิดอันตรายต่อกลไกของเครื่องยนต์ มอเตอร์ไฟฟ้าดังกล่าวสามารถปิดผนึกหรือไม่ปิดผนึกได้
ขอบเขตการใช้งาน เครื่องแปลงความถี่ค่อนข้างกว้างขวาง เป็นที่ต้องการในด้านเครื่องมือกลและระบบขับเคลื่อนไฟฟ้าของกลไกทางอุตสาหกรรม สายพานลำเลียง และระบบ การระบายอากาศเสียและอื่น ๆ หลักการทำงานของเครื่องกำเนิดความถี่คือกฎสำหรับการคำนวณความเร็วเชิงมุมของการหมุนเพลาซึ่งรวมถึงปัจจัยเช่นความถี่ของเครือข่ายการจ่าย ดังนั้นด้วยการเปลี่ยนความถี่กำลังของขดลวดมอเตอร์ไฟฟ้า จึงสามารถควบคุมความเร็วของการหมุนของโรเตอร์ของมอเตอร์ได้ในสัดส่วนโดยตรง ซึ่งจะช่วยลดความเร็วของมอเตอร์ไฟฟ้าหรือเพิ่มความเร็วได้ อุปกรณ์เหล่านี้เรียกอีกอย่างว่า "อินเวอร์เตอร์" เนื่องจากวิธีการแก้ไขปัญหาการควบคุมความถี่และแรงดันไฟฟ้าที่เอาต์พุตของตัวแปลงพร้อมกัน ตัวแปลงความถี่ทั้งหมดจำเป็นต้องทำเครื่องหมายด้วยแผ่นซึ่งระบุถึงคุณลักษณะ:
- กำลังมอเตอร์ไฟฟ้าสูงสุดที่เป็นไปได้
- แรงดันไฟฟ้า;
- จำนวนเฟส (เฟสเดียว, สามเฟส)
ตัวแปลงความถี่ทางอุตสาหกรรมส่วนใหญ่ได้รับการออกแบบมาให้ใช้งาน เครือข่ายสามเฟสกระแสสลับ แต่ยังมีรุ่นอื่นๆ เช่น ตัวแปลงความถี่สำหรับมอเตอร์เฟสเดียว
การประยุกต์ใช้มอเตอร์ไฟฟ้า
ชีวิต คนทันสมัยเป็นการยากที่จะจินตนาการหากไม่มีกลไกเช่นมอเตอร์ไฟฟ้า มองไปรอบ ๆ - พวกมันเกือบจะแพร่หลายแล้ว ปัจจุบันมีการใช้ไม่เพียงแต่ในทุกอุตสาหกรรม แต่ยังรวมถึงการขนส่ง วัตถุ และอุปกรณ์โดยรอบด้วย ชีวิตประจำวันที่ทำงานและที่บ้าน ไดร์เป่าผม, พัดลม, จักรเย็บผ้า, เครื่องมือก่อสร้าง - นี่ไม่ใช่รายการอุปกรณ์ทั้งหมดที่ใช้มอเตอร์ไฟฟ้า
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสมีความน่าเชื่อถือเป็นพิเศษ เนื่องจากมีการใช้กันอย่างแพร่หลายในการขับเคลื่อนงานโลหะ เครื่องจักรงานไม้ และเครื่องจักรอุตสาหกรรมอื่นๆ ในเครื่องตีขึ้นรูป เครื่องยก ลิฟต์ เครื่องทอผ้า จักรเย็บผ้าและขนดิน พัดลมอุตสาหกรรม คอมเพรสเซอร์ ปั๊ม ,เครื่องหมุนเหวี่ยง,เครื่องผสมคอนกรีต มอเตอร์ไฟฟ้าของเครนถูกนำมาใช้ในการก่อสร้างด้านทุน อุตสาหกรรมและโยธา ในเหมืองแร่ อุตสาหกรรมโลหะ พลังงาน และการขนส่ง
รถไฟใต้ดิน รถราง รถราง - การขนส่งทุกประเภทเหล่านี้เป็นผลมาจากมอเตอร์ไฟฟ้า ทุกวันนี้ เป็นไปไม่ได้เลยที่จะจินตนาการถึงอาคารสำนักงานหรือที่พักอาศัยที่ไม่มีเครื่องปรับอากาศหรือระบบฟอกอากาศ - พวกเขาใช้มอเตอร์ไฟฟ้าด้วย การทำงานของอุปกรณ์ที่ทันสมัยที่สุดเป็นไปไม่ได้หากไม่มีมอเตอร์ไฟฟ้าดังนั้นคุณภาพและความน่าเชื่อถือของกลไกนี้จึงขึ้นอยู่กับคุณภาพและความน่าเชื่อถือของกลไกนี้เป็นอย่างมาก การพังทลายของมันสามารถนำไปสู่ผลลัพธ์ที่น่าเศร้าอย่างยิ่ง รวมถึงการหยุดการผลิตและการสูญเสียทางการเงินครั้งใหญ่ ดังนั้นคุณสามารถซื้อมอเตอร์ไฟฟ้าได้จากซัพพลายเออร์ที่เชื่อถือได้และเชื่อถือได้ซึ่งรับประกันคุณภาพของผลิตภัณฑ์เท่านั้น
หลักการทำงานของมอเตอร์ไฟฟ้า
หลักการทำงานของมอเตอร์ไฟฟ้าคือผลของแม่เหล็กซึ่งช่วยให้คุณแปลงร่างได้อย่างมีประสิทธิภาพ พลังงานไฟฟ้าถึงเครื่องกล หลักการแปลงพลังงานให้เป็น ประเภทต่างๆมอเตอร์ไฟฟ้าจะเหมือนกันกับมอเตอร์ไฟฟ้าทุกประเภท แต่การออกแบบมอเตอร์และวิธีการควบคุมความเร็วของแรงบิดในการหมุนอาจแตกต่างกันไป ทุกคนรู้ตัวอย่างที่ง่ายที่สุดของมอเตอร์ไฟฟ้าจากโรงเรียน - เมื่อเฟรมหมุนระหว่างขั้วของแม่เหล็กถาวร แน่นอนว่าการออกแบบมอเตอร์ไฟฟ้าที่ใช้ในกลไกทางอุตสาหกรรมหรือ เครื่องใช้ในครัวเรือนยากกว่ามาก มาดูกันว่ามอเตอร์ไฟฟ้าแบบอะซิงโครนัสทำงานอย่างไรซึ่งแพร่หลายที่สุดในอุตสาหกรรม
หลักการทำงานของมอเตอร์ไฟฟ้าแบบอะซิงโครนัส
หลักการทำงาน มอเตอร์แบบอะซิงโครนัสเช่นเดียวกับอย่างอื่น ขึ้นอยู่กับการใช้สนามแม่เหล็กที่กำลังหมุน ความเร็วการหมุนของสนามแม่เหล็กมักเรียกว่าซิงโครนัสเนื่องจากสอดคล้องกับความเร็วการหมุนของแม่เหล็ก ในกรณีนี้ความเร็วในการหมุนของกระบอกสูบมักเรียกว่าแบบอะซิงโครนัสนั่นคือมันไม่ตรงกับความเร็วในการหมุนของแม่เหล็ก ความเร็วในการหมุนของกระบอกสูบ (โรเตอร์) แตกต่างจากความเร็วการหมุนแบบซิงโครนัสของสนามแม่เหล็กในปริมาณเล็กน้อยที่เรียกว่าสลิป เพื่อบังคับกำลัง กระแสไฟฟ้าการสร้างสนามแม่เหล็กหมุนและใช้หมุนโรเตอร์มักจะใช้กระแสไฟสามเฟส
อุปกรณ์มอเตอร์ไฟฟ้า
ที่ขั้วของแกนเหล็กรูปวงแหวนเรียกว่าสเตเตอร์ของมอเตอร์ไฟฟ้ามีขดลวด 3 เส้น โครงข่าย กระแสสามเฟสวางอันหนึ่งสัมพันธ์กันที่มุม 120° ภายในแกนกลางจะมีกระบอกโลหะติดตั้งอยู่บนแกนที่เรียกว่าโรเตอร์ของมอเตอร์ไฟฟ้า หากขดลวดเชื่อมต่อกันและเชื่อมต่อกับเครือข่ายกระแสไฟสามเฟสฟลักซ์แม่เหล็กทั้งหมดที่สร้างโดยเสาทั้งสามจะกลายเป็นการหมุน ฟลักซ์แม่เหล็กทั้งหมดในเวลาเดียวกันจะเปลี่ยนทิศทางโดยการเปลี่ยนทิศทางของกระแสในขดลวดสเตเตอร์ (ขั้ว) ในกรณีนี้ ในระหว่างช่วงหนึ่งของการเปลี่ยนแปลงของกระแสในขดลวด ฟลักซ์แม่เหล็กจะทำการปฏิวัติเต็มรูปแบบ ฟลักซ์แม่เหล็กที่กำลังหมุนจะพากระบอกสูบไปด้วย และเราจะได้มอเตอร์ไฟฟ้าแบบอะซิงโครนัส
ขดลวดสเตเตอร์สามารถเชื่อมต่อเป็นรูปดาวได้ แต่สนามแม่เหล็กที่กำลังหมุนจะถูกสร้างขึ้นเช่นกันเมื่อเชื่อมต่อเป็นรูปสามเหลี่ยม หากคุณสลับขดลวดของเฟสที่สองและสาม ฟลักซ์แม่เหล็กจะเปลี่ยนทิศทางการหมุนไปในทิศทางตรงกันข้าม ผลลัพธ์เดียวกันนี้สามารถทำได้โดยไม่ต้องเปลี่ยนขดลวดสเตเตอร์ แต่โดยการกำหนดกระแสของเฟสที่สองของเครือข่ายไปยังเฟสที่สามของสเตเตอร์ และเฟสที่สามของเครือข่ายไปยังเฟสที่สองของสเตเตอร์ ดังนั้นคุณสามารถเปลี่ยนทิศทางการหมุนของสนามแม่เหล็กได้โดยการสลับสองเฟสใดก็ได้
การเชื่อมต่อมอเตอร์
สเตเตอร์ของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสมัยใหม่มีขั้วที่ไม่ออกเสียงเช่น พื้นผิวด้านในของสเตเตอร์นั้นเรียบสนิท เพื่อลดการสูญเสียกระแสไหลวน แกนสเตเตอร์ทำจากเหล็กแผ่นบางที่มีการประทับตรา แกนสเตเตอร์ที่ประกอบนั้นถูกยึดไว้ในตัวเรือนเหล็ก วางขดลวดทองแดงไว้ในช่องสเตเตอร์ ขดลวดเฟสของสเตเตอร์ของมอเตอร์ไฟฟ้าเชื่อมต่อกันด้วย "ดาว" หรือ "เดลต้า" ซึ่งจุดเริ่มต้นและจุดสิ้นสุดของขดลวดทั้งหมดจะถูกนำออกไปที่ตัวเรือน - ไปยังเกราะฉนวนพิเศษ อุปกรณ์สเตเตอร์นี้สะดวกมากเนื่องจากช่วยให้คุณสามารถเปลี่ยนขดลวดเป็นแรงดันไฟฟ้ามาตรฐานที่แตกต่างกันได้
โรเตอร์ของมอเตอร์อะซิงโครนัส เช่น สเตเตอร์ ทำจากแผ่นเหล็กประทับตรา ขดลวดจะถูกวางไว้ในช่องของโรเตอร์ มอเตอร์ไฟฟ้าแบบอะซิงโครนัสแบ่งออกเป็นมอเตอร์ทั้งนี้ขึ้นอยู่กับการออกแบบโรเตอร์ โรเตอร์กรงกระรอกและโรเตอร์โรเตอร์ ขดลวดของโรเตอร์กรงกระรอกทำจากแท่งทองแดงที่วางอยู่ในร่องของโรเตอร์ ปลายแท่งเชื่อมต่อกันโดยใช้วงแหวนทองแดง การม้วนแบบนี้เรียกว่าการม้วนกรงกระรอก โปรดทราบว่าแท่งทองแดงในร่องไม่ได้หุ้มฉนวน
4-6. การคำนวณมอเตอร์ไฟฟ้ากระแสตรง
เราเริ่มการคำนวณด้วยมอเตอร์ไฟฟ้ากระแสตรงเนื่องจากการคำนวณนั้นง่ายกว่าและชัดเจนกว่ามอเตอร์ไฟฟ้ากระแสสลับ ต่อไปนี้เป็นคำอธิบายโดยละเอียดเกี่ยวกับปริมาณที่คำนวณได้ทั้งหมดที่จะพบในมอเตอร์ AC ในภายหลัง การคำนวณนี้กำหนดไว้สำหรับมอเตอร์ไฟฟ้าสองขั้วที่มีการกระตุ้นแบบอนุกรม
ด้วยการระบุกำลัง ความเร็วในการหมุน และแรงดันไฟฟ้าของมอเตอร์ คุณสามารถกำหนดขนาดและข้อมูลการพันของมอเตอร์ไฟฟ้าได้ทั้งหมด การคำนวณมอเตอร์ไฟฟ้าเริ่มต้นด้วยการกำหนดสองมิติหลัก ได้แก่ เส้นผ่านศูนย์กลางและความยาวของกระดอง มิติเหล่านี้รวมอยู่ในสูตร:
โดยที่ D คือเส้นผ่านศูนย์กลางของสมอ, m; l — ความยาวสมอ, m; P i - พลังการออกแบบ, W; A—โหลดกระดองเชิงเส้น, A/m; B คือการเหนี่ยวนำแม่เหล็กในช่องว่างอากาศ T; n - ความเร็วในการหมุนที่กำหนด, รอบต่อนาที
ความยาวและเส้นผ่านศูนย์กลางของกระดองมอเตอร์ไฟฟ้าแสดงเป็นหน่วยเมตร เนื่องจากในกรณีนี้สูตรการคำนวณที่เกี่ยวข้องกับขนาดของมอเตอร์ที่มีการเหนี่ยวนำและการไหลจะสะดวกและง่ายกว่า ผลการคำนวณที่ได้เป็นเมตรสามารถแปลงเป็นเซนติเมตรหรือมิลลิเมตรได้อย่างง่ายดายเพื่อการใช้งานจริงในการผลิตชิ้นส่วนต่างๆ
ด้านซ้ายของสูตรเป็นสัดส่วนกับปริมาตรของกระดอง ที่จริง หากคุณคูณด้วย π แล้วหารด้วย 4 คุณจะได้ปริมาตรของกระบอกสูบ ซึ่งเป็นเกราะของมอเตอร์ไฟฟ้า ดังที่เห็นได้จากด้านขวาของสูตร ปริมาตรของกระดองแปรผันตามกำลังของมอเตอร์ไฟฟ้า P i และแปรผกผันกับความเร็วในการหมุน n จากตรงนี้ เราสามารถสรุปได้ว่ายิ่งความเร็วในการหมุนของ กระดองมอเตอร์ไฟฟ้าขนาดที่เล็กลงก็จะมีกำลังเท่ากัน และขนาดของชิ้นส่วนที่เหลือของมอเตอร์ไฟฟ้าจะขึ้นอยู่กับขนาดของกระดอง
กำลังโดยประมาณของมอเตอร์ไฟฟ้า, W,
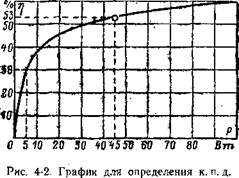
ที่ไหน E- e d.s. เหนี่ยวนำให้เกิดขดลวดกระดองเมื่อหมุนในสนามแม่เหล็ก V; ฉัน คือกระแสไฟฟ้าที่มอเตอร์ไฟฟ้าใช้จากแหล่งกำเนิด A; P คือกำลังไฟของมอเตอร์ไฟฟ้า W; η คือประสิทธิภาพของมอเตอร์ไฟฟ้า ซึ่งค่านี้สามารถหาได้จากเส้นโค้งในรูปที่ 1 4-2; ดังที่เห็นได้จากเส้นโค้ง ค่าประสิทธิภาพจะลดลงเมื่อกำลังมอเตอร์ไฟฟ้าลดลง
ค่าตัวเลขของกำลังการออกแบบนั้นได้มาจากการแก้ (4-2) โดยที่ทราบค่าของปริมาณทั้งหมด พลังการออกแบบนั้นยิ่งใหญ่กว่าเสมอ กำลังไฟพิกัดมอเตอร์ไฟฟ้า เนื่องจากส่วนหนึ่งของพลังงานที่ให้มาจะสูญเสียไปในตัวมอเตอร์ไฟฟ้าเอง
กระแสไฟที่ใช้โดยมอเตอร์ไฟฟ้า, A,
โดยที่ P คือกำลังไฟพิกัด W; U—แรงดันไฟฟ้าปกติ, V; η - ประสิทธิภาพตามเส้นโค้งในรูปที่ 4-2.
ตอนนี้เราสามารถกำหนด e ได้ d.s. E ซึ่งจะต้องใช้ในภายหลัง:
โดยที่ N คือจำนวนตัวนำของขดลวดกระดอง ตัวประกอบของ 2 ในตัวส่วนแสดงว่า กระแสรวมกระดอง I จากแผ่นสะสมจะแตกแขนงระหว่างตัวนำทั้งสองของขดลวดและมีกระแสเพียงครึ่งหนึ่งที่ไหลผ่านตัวนำแต่ละตัว ผลคูณ πD แสดงถึงเส้นรอบวงของกระดอง
ดังนั้น โหลดเชิงเส้นจะแสดงจำนวนแอมแปร์ต่อเส้นรอบวงกระดอง 1 เมตร โหลดเชิงเส้น A และการเหนี่ยวนำแม่เหล็กในช่องว่างอากาศ B เรียกว่าโหลดแม่เหล็กไฟฟ้า พวกเขาแสดงให้เห็นว่ามอเตอร์ไฟฟ้ามีภาระหนักมากทั้งทางไฟฟ้าและสนามแม่เหล็ก จาก (4-1) เห็นได้ชัดว่ายิ่งผลิตภัณฑ์ AB มีขนาดใหญ่ ขนาดของกระดองก็จะยิ่งเล็กลงเท่านั้น แต่ค่าของ A และ B ไม่ควรเกินขีดจำกัดที่กำหนด เนื่องจากไม่เช่นนั้นมอเตอร์ไฟฟ้าจะร้อนมากระหว่างการทำงาน
อย่างไรก็ตาม การทำความร้อนของมอเตอร์ไฟฟ้าไม่เพียงขึ้นอยู่กับโหลดแม่เหล็กไฟฟ้าเท่านั้น แต่ยังขึ้นอยู่กับเวลาในการทำงานด้วย มอเตอร์ไฟฟ้าบางชนิดทำงานเป็นเวลานานโดยไม่หยุด เช่น มอเตอร์พัดลม มอเตอร์ไฟฟ้าอื่นๆ ทำงานเป็นระยะๆ ในระหว่างนั้นจะมีเวลาให้เย็นลง เช่น มอเตอร์ไฟฟ้ารุ่นเครน เครื่องเล่นไฟฟ้า และเครื่องดูดฝุ่น การทำงานของมอเตอร์ไฟฟ้าเป็นระยะ ๆ เรียกว่าการทำงานไม่ต่อเนื่อง ซึ่งหมายความว่ามอเตอร์ไฟฟ้าเปิดอยู่ เวลาอันสั้นแล้วเกิดการพังและมอเตอร์ไฟฟ้าก็เปิดอีกครั้ง
ระยะเวลาของการเปิดมอเตอร์ไฟฟ้าดังกล่าวจะแสดงเป็นเปอร์เซ็นต์ของช่วงเวลาหนึ่งซึ่งใช้เวลา 10 นาที ตัวอย่างเช่น หากมอเตอร์ไฟฟ้าทำงานในช่วงเวลาหนึ่งเป็นเวลา 2.5 นาทีและหยุดทำงานในช่วงเวลาที่เหลือ เวลาทำงานตรงจะเท่ากับ 25% หากมอเตอร์ไฟฟ้าทำงานเป็นเวลา 4 นาที แสดงว่าระยะเวลาในการทำงานคือ 40%
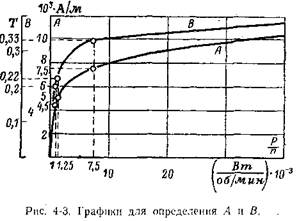
การเลือกโหลดเชิงเส้นและการเหนี่ยวนำแม่เหล็กนั้นทำขึ้นตามเส้นโค้งในรูปที่ 1 4-3 โดยที่แกนนอนแสดงอัตราส่วนของกำลังรับพิกัด ความถี่ที่กำหนดการหมุน ในรูป 4-3 ให้ค่า A และ B สำหรับมอเตอร์ไฟฟ้าที่มีการทำงานระยะยาว ตัวอย่างเช่น หากมอเตอร์ไฟฟ้า 80 W ที่ความเร็วการหมุน 4,000 รอบต่อนาทีทำงานเป็นเวลานานที่โหลดเต็ม เราจะพล็อตค่า 80/4 000 = 20 10 -3 บนแกนนอน บนเส้นแนวตั้ง เราวัดค่าของโหลดเชิงเส้น A = 9,000 A/m และการเหนี่ยวนำในช่องว่างอากาศ B = 0.35 T
ด้วยการทำงานแบบไม่ต่อเนื่องและระยะสั้นโดยมีเวลาตรง 25% ค่าของโหลดแม่เหล็กไฟฟ้าจะเพิ่มขึ้น 30% นั่นคือรับเพิ่มอีก 1.3 เท่า แล้ว
A = 9000 1.3 = 11,700 A/m,
และการเหนี่ยวนำแม่เหล็ก
B = 0.35 1.3 = 0.455 ต.
ลองแสดงว่า l/D=e. ค่า e สำหรับมอเตอร์ไฟฟ้าขนาดเล็กอยู่ในช่วง 0.4 ถึง 1.6 หากคุณต้องการมอเตอร์ไฟฟ้าที่มีความยาวสั้นกว่าแต่มีเส้นผ่านศูนย์กลางใหญ่กว่า ให้ใช้ e = 0.4 ในทางตรงกันข้าม หากมอเตอร์ไฟฟ้าต้องพอดีกับท่อที่มีเส้นผ่านศูนย์กลางเล็ก ให้เลือก e = 1.6 หากขนาดของมอเตอร์ไฟฟ้าไม่ถูกผูกมัดด้วยเงื่อนไขใด ๆ โดยปกติแล้วจะใช้ e=1 โดยการนำอัตราส่วน l/D = e เข้าไป ด้านซ้าย(4-1) เราหลุดพ้นจาก l ที่ไม่รู้จัก และ (4-1) มีรูปแบบดังนี้
เมื่อพิจารณา D แล้วเราจะพบ l=De วิธีนี้จะกำหนดขนาดหลักของมอเตอร์ไฟฟ้า
ตอนนี้เรามาดูการคำนวณขดลวดของกระดองกัน ในการทำเช่นนี้คุณจะต้องกำหนดฟลักซ์แม่เหล็กของมอเตอร์ไฟฟ้า
หากการเหนี่ยวนำแม่เหล็กในช่องว่างอากาศคูณด้วยพื้นที่ที่สายไฟเข้าสู่กระดองเราจะได้ฟลักซ์แม่เหล็กของมอเตอร์ไฟฟ้าซึ่งเราแสดงด้วยตัวอักษรกรีก Ф (phi):
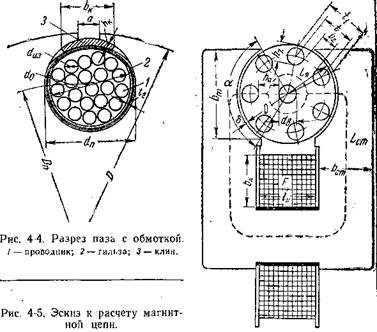
ฟลักซ์แม่เหล็กวัดเป็นเวเบอร์ ตัวอักษรกรีก τ (tau) หมายถึงการแบ่งขั้ว นั่นคือ ส่วนหนึ่งของเส้นรอบวงกระดองที่ตกลงบนขั้วเดียว ในมอเตอร์ไฟฟ้าแบบสองขั้ว การแบ่งขั้วคือ τ=πD/2 ตัวอักษรกรีก a (อัลฟา) ระบุว่าส่วนใดของการแบ่งขั้วถูกครอบครองโดยส่วนโค้งของขั้ว b t (รูปที่ 4-5) โดยปกติแล้ว a = 0.65 ดังนั้นผลิตภัณฑ์ aτl ให้พื้นที่ของเสาที่หันหน้าไปทางกระดอง
จำนวนช่องกระดองถูกกำหนดจากความสัมพันธ์ Zµ3D ซึ่งเส้นผ่านศูนย์กลางของกระดองแสดงเป็นเซนติเมตร ขอแนะนำให้ใช้เลขคี่ที่ใกล้กับผลลัพธ์มากที่สุด จำนวนตัวนำกระดองถูกกำหนดโดยสูตร
จำนวนตัวนำในหนึ่งช่องคือ N z =N/Z จำนวน N z ที่ได้รับระหว่างการคำนวณจะต้องปัดเศษเป็นจำนวนเต็มคู่ที่ใกล้ที่สุดเพื่อให้สามารถพันขดลวดเป็นสองชั้นได้ การเลือกจำนวนช่องและจำนวนตัวนำจะชัดเจนจากตัวอย่างตัวเลขในการคำนวณมอเตอร์ไฟฟ้า
ภาพตัดขวางของลวดสำหรับขดลวดกระดองสามารถกำหนดได้โดยการหารกระแสในตัวนำด้วยความหนาแน่นกระแส ความหนาแน่นกระแสแสดงจำนวนแอมแปร์ที่ไหลผ่านหน้าตัดของเส้นลวดแต่ละตารางมิลลิเมตร และแสดงด้วยตัวอักษรกรีก A (เดลต้า) ดังนั้นหน้าตัดของลวด mm 2
ควรเลือกความหนาแน่นกระแสสำหรับมอเตอร์ไฟฟ้ากระแสตรงแบบโฮมเมดในช่วงตั้งแต่ 6 ถึง 12 A/mm 2 สำหรับมอเตอร์ขนาดเล็กที่มีความเร็วในการหมุนสูง ความหนาแน่นกระแสจะเข้าใกล้ค่าที่แนะนำด้านบนมากขึ้น สำหรับเครื่องยนต์ขนาดใหญ่ที่มีความเร็วในการหมุนต่ำกว่า ค่าที่ต่ำกว่าจะใกล้เคียงกับค่าที่ต่ำกว่า
ไวร์เกจตัวนี้เป็นเบื้องต้นครับ ในคอลัมน์ที่สองของตาราง 4-1 คุณต้องค้นหาหน้าตัดของเส้นลวดมาตรฐานที่ใกล้เคียงที่สุดกับเส้นลวดที่คำนวณไว้ ในคอลัมน์แรกของตารางนี้ เราจะพบเส้นผ่านศูนย์กลางของเส้นลวด d การไม่มีลวดที่มีเส้นผ่านศูนย์กลางที่ต้องการไม่สามารถรบกวนการผลิตมอเตอร์ไฟฟ้าได้เนื่องจากมีโอกาสที่ดีในการเปลี่ยนสายไฟ ประการแรก สามารถเปลี่ยนลวดหนึ่งเส้นด้วยสายไฟสองเส้นได้หากหน้าตัดของสายไฟเหล่านี้เหมือนกับของลวดที่ถูกเปลี่ยน หน้าตัดของเส้นลวดขึ้นอยู่กับกำลังสองของเส้นผ่านศูนย์กลาง ซึ่งหมายความว่าเส้นลวดที่มีหน้าตัดเล็กกว่า 2 เท่าจะมีเส้นผ่านศูนย์กลางเล็กกว่า √2 เท่า ตัวอย่างเช่นแทนที่จะใช้ลวดที่มีเส้นผ่านศูนย์กลาง 0.29 มม. คุณสามารถใช้ลวดสองเส้นที่มีเส้นผ่านศูนย์กลาง 0.2 มม. ในกรณีนี้ความหนาแน่นกระแสจะยังคงไม่เปลี่ยนแปลงเกือบ แต่จำนวนสายไฟในร่องจะเพิ่มขึ้น 2 เท่า ความหนาแน่นของการเติมร่องด้วยสายไฟก็จะเพิ่มขึ้นเช่นกันเนื่องจากแต่ละเส้นมีฉนวนสองชั้น มันจะยากกว่าที่จะไขลานที่คดเคี้ยวเช่นนี้ คุณสามารถเปลี่ยนลวดหนึ่งเส้นเป็นสองเส้นได้ เส้นผ่านศูนย์กลางต่างกัน- ตัวอย่างเช่นแทนที่จะใช้ลวดที่มีเส้นผ่านศูนย์กลาง 0.29 มม. คุณสามารถใช้สายไฟสองเส้น: เส้นหนึ่งที่มีเส้นผ่านศูนย์กลาง 0.31 มม. และอีกเส้นที่มีเส้นผ่านศูนย์กลาง 0.27 มม. ดังที่เห็นได้จากตาราง 4 1 ผลรวมของหน้าตัดของสายไฟทดแทนทั้งสองจะเท่ากับหน้าตัดของลวดที่ถูกเปลี่ยน:
0.075 + 0.057 = 0.132 มม. 2
ในที่สุดเมื่อเลือกเส้นผ่านศูนย์กลางของเส้นลวด d ก็จำเป็นตามตาราง 4-2 กำหนดเส้นผ่านศูนย์กลาง ลวดหุ้มฉนวน d จาก เพิ่มความหนาสองด้าน δ จากฉนวน:
เรามากำหนดขนาดของร่องกัน สามารถคำนวณส่วนตัดขวางของร่อง S, mm 2 เพื่อรองรับตัวนำขดลวดได้โดยใช้สูตร:
โดยที่ k з คือค่าสัมประสิทธิ์การเติมร่อง แสดงว่าตัวนำเติมร่องแน่นเพียงใด
ยิ่งปัจจัยการเติมต่ำ พื้นที่ร่องก็ควรจะใหญ่ขึ้น ยิ่งค่าปัจจัยการเติมสูงและฉนวนของช่องหนามากเท่าไร การพันขดลวดก็จะยิ่งยากขึ้นเท่านั้น ในมอเตอร์ไฟฟ้าแบบโฮมเมดขอแนะนำให้หุ้มฉนวนด้วยปลอกร่อง 2 ที่ทำจากกระดาษแข็งไฟฟ้าที่มีความหนา 0.2 มม. มีการติดตั้งลิ่ม 3 ที่ทำจากกระดาษแข็งหนา 0.3 มม. ในร่องด้านบนของขดลวด (รูปที่ 4-4) ในการคำนวณคุณสามารถใช้ปัจจัยการเติม k 3 =0.4
ในมอเตอร์ไฟฟ้าที่ผลิตจากโรงงาน ช่องจะมีรูปทรงลูกแพร์ที่ซับซ้อน (ดูรูปที่ 2-10) เพื่อรองรับ ตัวนำมากขึ้นโดยไม่ทำให้ความหนาของฟันระหว่างร่องฟันลดลง ในมอเตอร์ไฟฟ้าแบบโฮมเมด การเจาะช่องกลมในแกนกระดองที่ถูกบีบอัดนั้นง่ายที่สุด (รูปที่ 4-5)
เส้นผ่านศูนย์กลางของร่องถูกกำหนดโดยหน้าตัด:
ระยะห่างระหว่างศูนย์กลางของร่องที่อยู่ติดกัน mm
และความหนาของฟัน มม.
ความหนาของฟันในที่แคบควรมีอย่างน้อย 2 มม. หากตามการคำนวณความหนาของฟันน้อยกว่า 2 มม. จำเป็นต้องเพิ่มเส้นผ่านศูนย์กลางของพุก ช่องของร่อง a ควรมีขนาดใหญ่กว่าเส้นผ่านศูนย์กลางของลวดหุ้มฉนวน 1 มม.
จำนวนแผ่นสะสมในมอเตอร์ไฟฟ้าต่อ แรงดันไฟฟ้าต่ำ(12 V และต่ำกว่า) จะถูกนำมาเท่ากับจำนวนช่องกระดอง การวางขดลวดกระดองในร่องและเชื่อมต่อเข้ากับแผ่นสะสมมีอธิบายไว้ในบทที่ 5. หน้าตัดของแปรงคาร์บอนกราไฟท์ S sch, cm 2 ถูกเลือกตามสูตร:
ที่ไหน? คุณคือความหนาแน่นกระแสใต้แปรง ? คุณ =5۞8A/cm2.
นี่เป็นการสรุปการคำนวณสมอ
มาดูการคำนวณระบบแม่เหล็กและขดลวดสนามกันดีกว่า สำหรับมอเตอร์ไฟฟ้าแบบโฮมเมด วิธีที่ง่ายที่สุดคือการใช้ระบบแม่เหล็กแบบเปิด (รูปที่ 4-5) เมื่อทำการคำนวณ ก่อนอื่นจะกำหนดช่องว่างอากาศ δ ระหว่างกระดองและเสา ในเครื่อง DC ขนาดของช่องว่างอากาศจะถูกกำหนดโดยสูตร
มุมส่วนโค้งของขั้วสามารถหาได้จากค่า a = 0.65 ครึ่งวงกลมมีมุม 180°; ดังนั้น a = 180° 0.65 = 117° ปัดเศษเป็น 120°
ขนาดของวงจรแม่เหล็กคำนวณตามการเหนี่ยวนำแม่เหล็กที่แนะนำในส่วนต่างๆ เมื่อคำนวณหน้าตัดของเสาและเฟรม ฟลักซ์แม่เหล็กจะเพิ่มขึ้น 10% เนื่องจากเส้นบางเส้นปิดระหว่างด้านข้างของเฟรม โดยข้ามกระดอง ดังนั้น ฟลักซ์แม่เหล็กของเสาและเฟรม F st = 1.1 F
การเหนี่ยวนำบนเตียง B st = 0.5 T. ความยาว สายไฟในกรอบ L st ถูกกำหนดจากแบบร่าง (รูปที่ 4-5) ที่นี่เส้นประแสดงเส้นทางของฟลักซ์แม่เหล็ก ประกอบด้วยส่วนต่างๆ ดังต่อไปนี้: ช่องว่างอากาศ 2 ช่อง ฟัน 2 ซี่ สมอ และโครง เพื่อค้นหาว่า n ใด กับ. ควรสร้างขดลวดกระตุ้นจำเป็นต้องคำนวณ n กับ. (Iw) สำหรับแต่ละส่วนเหล่านี้แล้วบวกทั้งหมดเข้าด้วยกัน มาเริ่มคำนวณ n กันดีกว่า กับ. จากช่องว่างอากาศ
แรงแม่เหล็กของช่องว่างอากาศสองช่อง:
โดยที่ δ คือช่องว่างอากาศที่ด้านหนึ่งของเกราะ, m; k δคือค่าสัมประสิทธิ์ช่องว่างอากาศซึ่งคำนึงถึงความต้านทานแม่เหล็กของช่องว่างอากาศที่เพิ่มขึ้นเนื่องจากการมีช่องร่องบนกระดอง ถือได้ว่าเป็น k δ =1,1; B - การเหนี่ยวนำในช่องว่างอากาศ T.
เพื่อกำหนดn. กับ. ในการกำหนดฟันของสมอคุณจำเป็นต้องรู้การเหนี่ยวนำของฟัน ความหนาของฟันถูกกำหนดโดย (4-12) ฟลักซ์แม่เหล็กจะเข้าสู่ฟันผ่านส่วนของเส้นรอบวงกระดองที่ถูกครอบครองโดยครอบฟันหนึ่งซี่และหนึ่งช่องของร่อง เรียกว่าการแบ่งฟัน เสื้อ 1 และถูกกำหนดโดยสูตร
การเหนี่ยวนำฟันจะมากกว่าการเหนี่ยวนำช่องว่างอากาศหลายเท่า เนื่องจากความหนาของฟันน้อยกว่าการแบ่งตัวของฟัน นอกจากนี้ควรคำนึงถึงว่าส่วนหนึ่งของความยาวของกระดองนั้นถูกครอบครองโดยชั้นฉนวนระหว่างแผ่นเหล็กของกระดองซึ่งมีปริมาณประมาณ 10% ดังนั้นจึงสามารถกำหนดความเหนี่ยวนำของฟันได้ด้วยสูตร
การอุปนัยนี้ตามตาราง 4-3 สอดคล้องกับความแรงของสนาม H z เพื่อคำนวณn กับ. ด้วยความสูงของฟันสองซี่ ต้องคูณ Hz ด้วยความสูงของฟันสองเท่า อย่างไรก็ตาม เมื่อพิจารณาว่าเมื่อใช้ร่องกลม การเหนี่ยวนำในส่วนบนและส่วนล่างของฟันจะลดลง ให้เราคูณ H z ด้วยความสูงของฟันหนึ่งซี่ lw z = H z h z .
เมื่อคำนวณการเหนี่ยวนำในแกนกระดองควรคำนึงว่าฟลักซ์แม่เหล็กที่อยู่ในนั้นแตกแขนงออกไปดังนั้นฟลักซ์เพียงครึ่งหนึ่งเท่านั้นที่ตกลงบนส่วนเดียว ส่วนของแกนกระดองตามรูปที่ 4-5 เท่ากับระยะห่างจากฐานของร่องถึงเพลาคูณด้วยความยาวกระดอง l:
นอกจากนี้ยังจำเป็นต้องคำนึงถึงชั้นฉนวนระหว่างแผ่นด้วย ดังนั้นการเหนี่ยวนำในแกนกระดอง
การอุปนัยนี้ตามตาราง 4-3 สอดคล้องกับ N i แรงแม่เหล็กของแกนกระดอง:
โดยที่ L i คือความยาวของสายไฟในแกนกลาง m ตามรูปที่ 4-5:
ดังที่เห็นได้ในรูป 4-5 มอเตอร์ไฟฟ้านี้ไม่มีเสาที่ยื่นออกมาเนื่องจากถูกรวมเข้ากับเฟรม ดังนั้นการคำนวณส่วนที่อยู่กับที่ของวงจรแม่เหล็กจึงลงมาอยู่ที่การคำนวณเฟรม ความกว้างของเตียงถูกกำหนดโดยการเหนี่ยวนำที่กำหนด B = 0.5 T, m,
ความแรงของสนาม H st สำหรับการเหนี่ยวนำ 0.5 T พบได้ในตาราง 4-3. ในการกำหนดความยาวของสายไฟในเฟรมเราพบปัญหาเนื่องจากความยาวของด้านข้างของเฟรมขึ้นอยู่กับความหนาของขดลวดและเรายังไม่ทราบ ดังนั้นเราจึงหาความหนาของคอยล์ b k = 30 δ โดยที่ δ คือช่องว่างอากาศ ความสัมพันธ์ระหว่างความหนาของขดลวดและช่องว่างอธิบายได้จากข้อเท็จจริงที่ว่า n ขึ้นอยู่กับขนาดของช่องว่างเป็นหลัก กับ. คอยล์และขนาดของคอยล์ด้วย เมื่อพิจารณาจากร่างความยาวของสายไฟในกรอบ L st แล้วคุณสามารถคำนวณ n ได้ กับ. เตียง:
ทีนี้ลองบวก n กัน กับ. ทุกส่วน:
เช่น กับ. ควรสร้างโดยขดลวดเมื่อมอเตอร์ไฟฟ้าเดินเบา แต่ภายใต้ภาระ เมื่อกระแสในกระดองเพิ่มขึ้น ผลการลดอำนาจแม่เหล็กของสนามแม่เหล็กของกระดองจะปรากฏขึ้น ดังนั้นน. กับ. ขดลวดต้องมีสำรองอยู่บ้างซึ่งคำนวณโดยสูตร
ดังนั้น น. กับ. คอยล์ภายใต้ภาระของมอเตอร์
![]()
กระแสกระดองจะผ่านขดลวดกระตุ้น ดังนั้นจำนวนรอบของขดลวดจะเป็น w = Iw/I
ในการกำหนดหน้าตัดของเส้นลวด คุณต้องแบ่งความแรงของกระแสไฟฟ้าด้วยความหนาแน่นกระแส ใช้เวลาน้อยกว่าการพันขดลวดกระดองเนื่องจากการหมุนของขดลวดอยู่นิ่งและทำให้เย็นลงได้ไม่ดี
หน้าตัดของขดลวด มม. 2, s = I/?
ตามตารางครับ 4-1 เราค้นหาหน้าตัดมาตรฐานและเส้นผ่านศูนย์กลางของเส้นลวดที่ใกล้ที่สุด โดยเลือกยี่ห้อลวดตามตารางแล้ว 4-2 เราพบเส้นผ่านศูนย์กลางของลวดหุ้มฉนวน d pz หากต้องการทราบความหนาของขดลวดคุณจำเป็นต้องทราบพื้นที่ mm 2 ซึ่งครอบครองโดยการหมุนของขดลวดซึ่งสามารถกำหนดได้โดยสูตร
หารพื้นที่ด้วยความยาวของคอยล์ซึ่งกำหนดไว้ lk ในแบบร่างเราได้ความหนาของคอยล์ mm
ดังนั้นตามข้อมูลที่ระบุของมอเตอร์ไฟฟ้าซึ่งแสดงด้วยตัวเลขเพียงสามหลักโดยใช้สูตรและตารางเราได้กำหนดขนาดทั้งหมดของมอเตอร์ไฟฟ้าที่จำเป็นสำหรับการผลิต มอเตอร์ไฟฟ้าที่ออกแบบจะทำงานได้อย่างน่าเชื่อถือและการทำความร้อนจะไม่เกินมาตรฐานที่อนุญาต นี่คือค่าของการคำนวณมอเตอร์ไฟฟ้า เป็นไปได้ไหมที่จะ "เดา" ขนาดทั้งหมดนี้โดยไม่ต้องคำนวณ? อาจเป็นไปได้ว่ามอเตอร์ไฟฟ้าจะต้องได้รับการปรับปรุงใหม่หลายครั้งเพื่อให้ได้ผลลัพธ์ที่น่าพอใจ โดยใช้เวลาในการเปลี่ยนแปลงเหล่านี้นานกว่าการคำนวณหลายเท่า ไม่ต้องพูดถึงวัสดุที่เสียหาย นอกจากนี้ในระหว่างกระบวนการคำนวณ คุณจะได้รับทักษะในการคำนวณทางเทคนิคและความรู้เกี่ยวกับทฤษฎีเครื่องจักรไฟฟ้า
เอ็น.วี. Vinogradov, Yu.N. วิโนกราดอฟ
วิธีการคำนวณและสร้างมอเตอร์ไฟฟ้าด้วยตัวเอง
มอสโก 2517
เงื่อนไขการเลือกมอเตอร์ไฟฟ้า
การเลือกมอเตอร์ไฟฟ้าประเภทใดประเภทหนึ่งถือว่าถูกต้องหากตรงตามเงื่อนไขต่อไปนี้:
ก) ความสอดคล้องที่สมบูรณ์ที่สุดของมอเตอร์ไฟฟ้ากับเครื่องจักรทำงาน (ไดรฟ์) ในแง่ของคุณสมบัติทางกล
ซึ่งหมายความว่ามอเตอร์ไฟฟ้าจะต้องมีคุณสมบัติทางกลที่สามารถให้ความเร็วและความเร่งที่จำเป็นแก่ไดรฟ์ทั้งระหว่างการทำงานและระหว่างสตาร์ทเครื่อง
b) การใช้กำลังมอเตอร์ไฟฟ้าสูงสุดระหว่างการทำงาน อุณหภูมิของชิ้นส่วนที่ใช้งานทั้งหมดของมอเตอร์ไฟฟ้าในสภาวะการทำงานที่รุนแรงที่สุดควรใกล้เคียงกับอุณหภูมิความร้อนที่กำหนดตามมาตรฐานมากที่สุด แต่ไม่เกินอุณหภูมิดังกล่าว c) ความสอดคล้องของมอเตอร์ไฟฟ้ากับไดรฟ์และเงื่อนไข
สิ่งแวดล้อม
โดยการออกแบบ 
d) ความสอดคล้องของมอเตอร์ไฟฟ้ากับพารามิเตอร์ของเครือข่ายที่จ่ายให้
b) กำลังสูงสุดบนเพลาขับของกลไกหากโหมดการทำงานต่อเนื่องและโหลดคงที่และในกรณีอื่น ๆ - กราฟของการเปลี่ยนแปลงของกำลังหรือโมเมนต์ความต้านทานเป็นฟังก์ชันของเวลา
c) ความเร็วในการหมุนของเพลาขับของกลไก
d) วิธีการต่อกลไกกับเพลามอเตอร์ไฟฟ้า (หากมีเกียร์จะระบุประเภทของเกียร์และอัตราทดเกียร์)
e) ขนาดของแรงบิดเริ่มต้นที่มอเตอร์ไฟฟ้าบนเพลาขับของกลไกต้องมี
f) ขีด จำกัด การควบคุมความเร็วของกลไกขับเคลื่อนซึ่งระบุค่าความเร็วบนและล่างและค่ากำลังและแรงบิดที่สอดคล้องกัน
g) ลักษณะและคุณภาพ (ความราบรื่น ทีละขั้นตอน) ของการปรับความเร็วที่จำเป็น
h) ความถี่ของการสตาร์ทหรือการเปิดใช้งานไดรฟ์ต่อชั่วโมง i) ลักษณะของสิ่งแวดล้อม
การเลือกมอเตอร์ไฟฟ้าตามเงื่อนไขทั้งหมดนั้นจัดทำขึ้นตามข้อมูลแค็ตตาล็อก
สำหรับกลไกที่ใช้กันอย่างแพร่หลาย การเลือกมอเตอร์ไฟฟ้าจะง่ายขึ้นอย่างมากเนื่องจากข้อมูลที่มีอยู่ในข้อมูลที่เกี่ยวข้องจากผู้ผลิต และลงมาเพื่อระบุประเภทของมอเตอร์ไฟฟ้าที่เกี่ยวข้องกับพารามิเตอร์เครือข่ายและลักษณะของสภาพแวดล้อม
การเลือกใช้มอเตอร์ไฟฟ้าตามกำลัง
การเลือกกำลังของมอเตอร์ไฟฟ้าจะต้องเป็นไปตามลักษณะของโหลดของเครื่องทำงาน 
ตัวละครนี้ได้รับการประเมินตามเกณฑ์สองประการ:
ก) ตามแบบวิธีการทำงานที่กำหนด
b) โดยการเปลี่ยนแปลงปริมาณพลังงานที่ใช้
โหมดการทำงานต่อไปนี้มีความโดดเด่น: ก) ยาว (long) เมื่อระยะเวลาการทำงานยาวนานขนาดนั้นทำความร้อนมอเตอร์ไฟฟ้า
ถึงค่าสถานะคงตัว (เช่น ปั๊ม สายพานลำเลียง พัดลม ฯลฯ) b) ระยะสั้น เมื่อระยะเวลาการทำงานไม่เพียงพอสำหรับมอเตอร์ไฟฟ้าที่จะบรรลุอุณหภูมิ - ความร้อน
สอดคล้องกับโหลดที่กำหนดให้ และคาบหยุดก็เพียงพอที่จะทำให้มอเตอร์ไฟฟ้าเย็นลงจนถึงอุณหภูมิแวดล้อม มอเตอร์ไฟฟ้าที่มีกลไกหลากหลายสามารถทำงานในโหมดนี้ได้
c) ไม่ต่อเนื่อง - ด้วยระยะเวลาการสลับสัมพัทธ์ 15, 25, 40 และ 60% โดยมีระยะเวลาหนึ่งรอบไม่เกิน 10 นาที (เช่น สำหรับเครน เครื่องมือกลบางชนิด มอเตอร์เชื่อมสถานีเดียว - เครื่องกำเนิดไฟฟ้า ฯลฯ .)
ก) โหลดคงที่ เมื่อปริมาณพลังงานที่ใช้ระหว่างการทำงานคงที่หรือมีการเบี่ยงเบนเล็กน้อยจากค่าเฉลี่ย เช่น กับปั๊มแรงเหวี่ยง พัดลม คอมเพรสเซอร์ที่มีการไหลของอากาศคงที่ เป็นต้น
b) โหลดแบบแปรผัน เมื่อปริมาณพลังงานที่ใช้เปลี่ยนแปลงเป็นระยะ เช่น กับรถขุด เครน เครื่องมือกลบางชนิด เป็นต้น
c) โหลดแบบเป็นจังหวะ เมื่อปริมาณพลังงานที่ใช้เปลี่ยนแปลงอย่างต่อเนื่อง เช่น กับปั๊มลูกสูบ เครื่องบดกราม ตะแกรง ฯลฯ
กำลังของมอเตอร์ไฟฟ้าต้องเป็นไปตามเงื่อนไขสามประการ:
ก) การให้ความร้อนตามปกติระหว่างการทำงาน 
b) ความจุเกินพิกัดที่เพียงพอ
c) แรงบิดเริ่มต้นที่เพียงพอ
มอเตอร์ไฟฟ้าทั้งหมดแบ่งออกเป็นสองกลุ่มหลัก:
ก) สำหรับโหมดการทำงานระยะยาว (โดยไม่มีข้อจำกัดระยะเวลาการเปลี่ยน);
b) สำหรับโหมดไม่ต่อเนื่องโดยมีเวลาสลับ 15, 25, 40 และ 60%
สำหรับกลุ่มแรก แค็ตตาล็อกและหนังสือเดินทางระบุถึงกำลังต่อเนื่องที่มอเตอร์ไฟฟ้าสามารถพัฒนาได้อย่างไม่มีกำหนด สำหรับกลุ่มที่สอง คือกำลังที่มอเตอร์ไฟฟ้าสามารถพัฒนาได้โดยการทำงานเป็นระยะๆ เป็นระยะเวลานานโดยพลการโดยมีระยะเวลาการเปิดใช้งานที่แน่นอน
ในทุกกรณี ตัวเลือกที่ถูกต้องถือเป็นมอเตอร์ไฟฟ้าที่ทำงานกับโหลดตามกำหนดเวลาที่ระบุโดยเครื่องจักรที่ใช้งาน เพื่อให้ได้ความร้อนที่อนุญาตได้เต็มรูปแบบของชิ้นส่วนทั้งหมด การเลือกใช้มอเตอร์ไฟฟ้าที่เรียกว่า "พลังงานสำรอง" ซึ่งขึ้นอยู่กับโหลดสูงสุดที่เป็นไปได้ตามตารางการโหลด ส่งผลให้มอเตอร์ไฟฟ้าใช้งานน้อยเกินไป และส่งผลให้ต้นทุนเงินทุนและต้นทุนการดำเนินงานเพิ่มขึ้นเนื่องจากการลดลง ในปัจจัยด้านกำลังและประสิทธิภาพ
กำลังมอเตอร์ที่เพิ่มขึ้นมากเกินไปอาจทำให้เกิดการกระตุกระหว่างการเร่งความเร็วได้
หากมอเตอร์ไฟฟ้าต้องทำงานเป็นเวลานานโดยมีภาระคงที่หรือเปลี่ยนแปลงเล็กน้อย การกำหนดกำลังของมอเตอร์นั้นไม่ใช่เรื่องยากและดำเนินการโดยใช้สูตรที่มักจะมีค่าสัมประสิทธิ์เชิงประจักษ์
การเลือกกำลังของมอเตอร์ไฟฟ้าในโหมดการทำงานอื่นทำได้ยากกว่ามาก
โหลดระยะสั้นมีลักษณะเฉพาะคือระยะเวลาการเปลี่ยนสั้นและการหยุดชั่วคราวก็เพียงพอที่จะทำให้มอเตอร์ไฟฟ้าเย็นลงโดยสมบูรณ์ สันนิษฐานว่าภาระของมอเตอร์ไฟฟ้าในช่วงระยะเวลาการเปลี่ยนยังคงไม่เปลี่ยนแปลงหรือเกือบคงที่
เพื่อให้มอเตอร์ไฟฟ้าถูกใช้อย่างถูกต้องเพื่อให้ความร้อนในโหมดนี้ จำเป็นต้องเลือกเพื่อให้พลังงานระยะยาว (ระบุไว้ในแค็ตตาล็อก) น้อยกว่าพลังงานที่สอดคล้องกับโหลดระยะสั้นเช่น ว่ามอเตอร์ไฟฟ้ามีความร้อนเกินในช่วงระยะเวลาการทำงานระยะสั้น
หากระยะเวลาการทำงานของมอเตอร์ไฟฟ้าน้อยกว่าเวลาที่ใช้ในการทำความร้อนโดยสมบูรณ์อย่างมาก แต่การหยุดชั่วคราวระหว่างช่วงเวลาของการเปิดเครื่องนั้นสั้นกว่าเวลาทำความเย็นโดยสมบูรณ์อย่างมีนัยสำคัญ ภาระระยะสั้นจะเกิดขึ้น
ในทางปฏิบัติควรแยกแยะงานดังกล่าวได้สองประเภท:
ก) โหลดในช่วงเวลาทำงานมีขนาดคงที่ดังนั้นกราฟจึงแสดงเป็นสี่เหลี่ยมสลับกับการหยุดชั่วคราว
b) ภาระในช่วงระยะเวลาการทำงานเปลี่ยนแปลงไปตามกฎหมายที่ซับซ้อนไม่มากก็น้อย
ในทั้งสองกรณี ปัญหาในการเลือกมอเตอร์ไฟฟ้าด้วยกำลังสามารถแก้ไขได้ทั้งในเชิงวิเคราะห์และเชิงกราฟิก ทั้งสองวิธีนี้ค่อนข้างซับซ้อน ดังนั้นจึงแนะนำให้ใช้วิธีแบบง่ายที่มีความยิ่งใหญ่เท่ากัน ซึ่งประกอบด้วยสามวิธี:
ก) กระแสกำลังสองเฉลี่ยรูต;
b) รูทหมายถึงกำลังสองเฉลี่ย
c) รูทหมายถึงโมเมนต์กำลังสอง
การตรวจสอบความสามารถในการรับน้ำหนักเกินทางกลของมอเตอร์ไฟฟ้า
หลังจากเลือกกำลังของมอเตอร์ไฟฟ้าตามสภาวะการทำความร้อนแล้ว จำเป็นต้องตรวจสอบความสามารถในการรับน้ำหนักเกินทางกลของมอเตอร์ไฟฟ้า กล่าวคือ ตรวจสอบให้แน่ใจว่าแรงบิดโหลดสูงสุดตามกำหนดเวลาระหว่างการทำงานและแรงบิดเมื่อสตาร์ทเครื่อง จะไม่เกินค่าแรงบิดสูงสุดตามแค็ตตาล็อก 
สำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสและซิงโครนัส ปริมาณของโหลดเกินเชิงกลที่อนุญาตจะถูกกำหนดโดยแรงบิดแม่เหล็กไฟฟ้าที่พลิกคว่ำ เมื่อถึงจุดที่มอเตอร์ไฟฟ้าเหล่านี้หยุด
แรงบิดสูงสุดหลายหลากเมื่อเทียบกับแรงบิดที่ระบุควรเป็น 1.8 สำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสามเฟสที่มีวงแหวนสลิปและอย่างน้อย 1.65 สำหรับมอเตอร์ไฟฟ้ากรงกระรอกตัวเดียวกัน
หลายหลากของแรงบิดสูงสุดของมอเตอร์ไฟฟ้าซิงโครนัสจะต้องไม่ต่ำกว่า 1.65 ที่แรงดันไฟฟ้า ความถี่ และกระแสกระตุ้นที่กำหนด โดยมีตัวประกอบกำลัง 0.9 (ที่กระแสนำ)
การโอเวอร์โหลดที่อนุญาตของมอเตอร์ไฟฟ้ากระแสตรงถูกกำหนดโดยสภาพการทำงาน และตาม GOST นั้นมีช่วงตั้งแต่ 2 ถึง 4 แรงบิด โดยขีดจำกัดล่างหมายถึงมอเตอร์ไฟฟ้าที่กระตุ้นแบบขนาน และขีดจำกัดบนสำหรับมอเตอร์ไฟฟ้าที่กระตุ้นแบบอนุกรม
หากเครือข่ายจ่ายและจำหน่ายไวต่อโหลด จะต้องตรวจสอบความจุเกินพิกัดทางกลโดยคำนึงถึงการสูญเสียแรงดันไฟฟ้าในเครือข่าย
สำหรับมอเตอร์ไฟฟ้าแบบกรงกระรอกแบบอะซิงโครนัสและแบบซิงโครนัส แรงบิดเริ่มต้นหลายหลากต้องมีอย่างน้อย 0.9 (สัมพันธ์กับแรงบิดที่กำหนด)
ในความเป็นจริง แรงบิดเริ่มต้นหลายหลากสำหรับมอเตอร์ไฟฟ้าที่มีกรงกระรอกคู่และร่องลึกนั้นสูงกว่ามากและถึง 2-2.4
เมื่อเลือกกำลังของมอเตอร์ไฟฟ้า ควรคำนึงว่าความถี่ของการเปิดสวิตช์จะขึ้นอยู่กับความร้อนของมอเตอร์ไฟฟ้า ความถี่ในการเปลี่ยนที่อนุญาตนั้นขึ้นอยู่กับสลิปปกติ แรงบิดสวิงของโรเตอร์ และความหลากหลาย เริ่มต้นปัจจุบัน.
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสประเภทปกติไม่อนุญาตให้โหลดตั้งแต่ 400 ถึง 1,000 และมอเตอร์ไฟฟ้าที่มีสลิปเพิ่มขึ้น - จาก 1100 ถึง 2700 เริ่มต่อชั่วโมง เมื่อสตาร์ทภายใต้โหลด จำนวนสตาร์ทที่อนุญาตจะลดลงอย่างมาก
กระแสสตาร์ทของมอเตอร์ไฟฟ้าที่มีโรเตอร์แบบกรงกระรอกนั้นมีขนาดใหญ่ และสถานการณ์นี้มีความสำคัญภายใต้เงื่อนไขของการสตาร์ทบ่อยครั้ง และโดยเฉพาะอย่างยิ่งเมื่อมีเวลาในการเร่งความเร็วเพิ่มขึ้น
ตรงกันข้ามกับมอเตอร์ไฟฟ้าที่มีเฟสโรเตอร์ ซึ่งส่วนหนึ่งของความร้อนที่เกิดขึ้นระหว่างสตาร์ทเครื่องจะถูกปล่อยออกมาในลิโน่ เช่น ภายนอกเครื่องจักร ในมอเตอร์ไฟฟ้าแบบกรงกระรอก ความร้อนทั้งหมดจะถูกปล่อยออกมาในตัวเครื่องเอง ซึ่ง ทำให้เกิดความร้อนเพิ่มขึ้น ดังนั้นการเลือกกำลังไฟสำหรับมอเตอร์ไฟฟ้าเหล่านี้จะต้องคำนึงถึงการให้ความร้อนในระหว่างการสตาร์ทหลายครั้ง
เงื่อนไขการเลือกมอเตอร์ไฟฟ้า
การเลือกมอเตอร์ไฟฟ้าประเภทใดประเภทหนึ่งถือว่าถูกต้องหากตรงตามเงื่อนไขต่อไปนี้:
ก) ความสอดคล้องที่สมบูรณ์ที่สุดของมอเตอร์ไฟฟ้ากับเครื่องจักรทำงาน (ไดรฟ์) ในแง่ของคุณสมบัติทางกล
ซึ่งหมายความว่ามอเตอร์ไฟฟ้าจะต้องมีคุณสมบัติทางกลที่สามารถให้ความเร็วและความเร่งที่จำเป็นแก่ไดรฟ์ทั้งระหว่างการทำงานและระหว่างสตาร์ทเครื่อง
c) ความสอดคล้องของมอเตอร์ไฟฟ้ากับไดรฟ์และสภาวะแวดล้อมในแง่ของการออกแบบ
สิ่งแวดล้อม
โดยการออกแบบ
d) ความสอดคล้องของมอเตอร์ไฟฟ้ากับพารามิเตอร์ของเครือข่ายที่จ่ายให้
b) กำลังสูงสุดบนเพลาขับของกลไกหากโหมดการทำงานต่อเนื่องและโหลดคงที่และในกรณีอื่น ๆ - กราฟของการเปลี่ยนแปลงของกำลังหรือโมเมนต์ความต้านทานเป็นฟังก์ชันของเวลา
c) ความเร็วในการหมุนของเพลาขับของกลไก
d) วิธีการต่อกลไกกับเพลามอเตอร์ไฟฟ้า (หากมีเกียร์จะระบุประเภทของเกียร์และอัตราทดเกียร์)
e) ขนาดของแรงบิดเริ่มต้นที่มอเตอร์ไฟฟ้าบนเพลาขับของกลไกต้องมี
f) ขีด จำกัด การควบคุมความเร็วของกลไกขับเคลื่อนซึ่งระบุค่าความเร็วบนและล่างและค่ากำลังและแรงบิดที่สอดคล้องกัน
g) ลักษณะและคุณภาพ (ความราบรื่น ทีละขั้นตอน) ของการปรับความเร็วที่จำเป็น
h) ความถี่ของการสตาร์ทหรือการเปิดใช้งานไดรฟ์ต่อชั่วโมง i) ลักษณะของสิ่งแวดล้อม
การเลือกมอเตอร์ไฟฟ้าตามเงื่อนไขทั้งหมดนั้นจัดทำขึ้นตามข้อมูลแค็ตตาล็อก
สำหรับกลไกที่ใช้กันอย่างแพร่หลาย การเลือกมอเตอร์ไฟฟ้าจะง่ายขึ้นอย่างมากเนื่องจากข้อมูลที่มีอยู่ในข้อมูลที่เกี่ยวข้องจากผู้ผลิต และลงมาเพื่อระบุประเภทของมอเตอร์ไฟฟ้าที่เกี่ยวข้องกับพารามิเตอร์เครือข่ายและลักษณะของสภาพแวดล้อม
การเลือกใช้มอเตอร์ไฟฟ้าตามกำลัง
การเลือกกำลังของมอเตอร์ไฟฟ้าจะต้องเป็นไปตามลักษณะของโหลดของเครื่องทำงาน
ตัวละครนี้ได้รับการประเมินตามเกณฑ์สองประการ:
ก) ตามแบบวิธีการทำงานที่กำหนด
b) โดยการเปลี่ยนแปลงปริมาณพลังงานที่ใช้
โหมดการทำงานต่อไปนี้มีความโดดเด่น: ก) ยาว (long) เมื่อระยะเวลาการทำงานยาวนานขนาดนั้นทำความร้อนมอเตอร์ไฟฟ้า
ข) ระยะสั้น เมื่อระยะเวลาการทำงานไม่เพียงพอสำหรับมอเตอร์ไฟฟ้าที่จะถึงอุณหภูมิทำความร้อนที่สอดคล้องกับโหลดที่กำหนด และในทางกลับกัน ระยะเวลาหยุดเพียงพอที่จะทำให้มอเตอร์ไฟฟ้าเย็นลงจนถึงอุณหภูมิโดยรอบ มอเตอร์ไฟฟ้าที่มีกลไกหลากหลายสามารถทำงานในโหมดนี้ได้
สอดคล้องกับโหลดที่กำหนดให้ และคาบหยุดก็เพียงพอที่จะทำให้มอเตอร์ไฟฟ้าเย็นลงจนถึงอุณหภูมิแวดล้อม มอเตอร์ไฟฟ้าที่มีกลไกหลากหลายสามารถทำงานในโหมดนี้ได้
c) ไม่ต่อเนื่อง - ด้วยระยะเวลาการสลับสัมพัทธ์ 15, 25, 40 และ 60% โดยมีระยะเวลาหนึ่งรอบไม่เกิน 10 นาที (เช่น สำหรับเครน เครื่องมือกลบางชนิด มอเตอร์เชื่อมสถานีเดียว - เครื่องกำเนิดไฟฟ้า ฯลฯ .)
ก) โหลดคงที่ เมื่อปริมาณพลังงานที่ใช้ระหว่างการทำงานคงที่หรือมีการเบี่ยงเบนเล็กน้อยจากค่าเฉลี่ย เช่น กับปั๊มแรงเหวี่ยง พัดลม คอมเพรสเซอร์ที่มีการไหลของอากาศคงที่ เป็นต้น
b) โหลดแบบแปรผัน เมื่อปริมาณพลังงานที่ใช้เปลี่ยนแปลงเป็นระยะ เช่น กับรถขุด เครน เครื่องมือกลบางชนิด เป็นต้น
c) โหลดแบบเป็นจังหวะ เมื่อปริมาณพลังงานที่ใช้เปลี่ยนแปลงอย่างต่อเนื่อง เช่น กับปั๊มลูกสูบ เครื่องบดกราม ตะแกรง ฯลฯ
กำลังของมอเตอร์ไฟฟ้าต้องเป็นไปตามเงื่อนไขสามประการ:
ก) การให้ความร้อนตามปกติระหว่างการทำงาน
b) ความจุเกินพิกัดที่เพียงพอ
c) แรงบิดเริ่มต้นที่เพียงพอ
มอเตอร์ไฟฟ้าทั้งหมดแบ่งออกเป็นสองกลุ่มหลัก:
ก) สำหรับโหมดการทำงานระยะยาว (โดยไม่มีข้อจำกัดระยะเวลาการเปลี่ยน);
b) สำหรับโหมดไม่ต่อเนื่องโดยมีเวลาสลับ 15, 25, 40 และ 60%
สำหรับกลุ่มแรก แค็ตตาล็อกและหนังสือเดินทางระบุถึงกำลังต่อเนื่องที่มอเตอร์ไฟฟ้าสามารถพัฒนาได้อย่างไม่มีกำหนด สำหรับกลุ่มที่สอง คือกำลังที่มอเตอร์ไฟฟ้าสามารถพัฒนาได้โดยการทำงานเป็นระยะๆ เป็นระยะเวลานานโดยพลการโดยมีระยะเวลาการเปิดใช้งานที่แน่นอน
ในทุกกรณี ตัวเลือกที่ถูกต้องถือเป็นมอเตอร์ไฟฟ้าที่ทำงานกับโหลดตามกำหนดเวลาที่ระบุโดยเครื่องจักรที่ใช้งาน เพื่อให้ได้ความร้อนที่อนุญาตได้เต็มรูปแบบของชิ้นส่วนทั้งหมด การเลือกใช้มอเตอร์ไฟฟ้าที่เรียกว่า "พลังงานสำรอง" ซึ่งขึ้นอยู่กับโหลดสูงสุดที่เป็นไปได้ตามตารางการโหลด ส่งผลให้มอเตอร์ไฟฟ้าใช้งานน้อยเกินไป และส่งผลให้ต้นทุนเงินทุนและต้นทุนการดำเนินงานเพิ่มขึ้นเนื่องจากการลดลง ในปัจจัยด้านกำลังและประสิทธิภาพ
กำลังมอเตอร์ที่เพิ่มขึ้นมากเกินไปอาจทำให้เกิดการกระตุกระหว่างการเร่งความเร็วได้
หากมอเตอร์ไฟฟ้าต้องทำงานเป็นเวลานานโดยมีภาระคงที่หรือเปลี่ยนแปลงเล็กน้อย การกำหนดกำลังของมอเตอร์นั้นไม่ใช่เรื่องยากและดำเนินการโดยใช้สูตรที่มักจะมีค่าสัมประสิทธิ์เชิงประจักษ์
การเลือกกำลังของมอเตอร์ไฟฟ้าในโหมดการทำงานอื่นทำได้ยากกว่ามาก
โหลดระยะสั้นมีลักษณะเฉพาะคือระยะเวลาการเปลี่ยนสั้นและการหยุดชั่วคราวก็เพียงพอที่จะทำให้มอเตอร์ไฟฟ้าเย็นลงโดยสมบูรณ์ สันนิษฐานว่าภาระของมอเตอร์ไฟฟ้าในช่วงระยะเวลาการเปลี่ยนยังคงไม่เปลี่ยนแปลงหรือเกือบคงที่
เพื่อให้มอเตอร์ไฟฟ้าถูกใช้อย่างถูกต้องเพื่อให้ความร้อนในโหมดนี้ จำเป็นต้องเลือกเพื่อให้พลังงานระยะยาว (ระบุไว้ในแค็ตตาล็อก) น้อยกว่าพลังงานที่สอดคล้องกับโหลดระยะสั้นเช่น ว่ามอเตอร์ไฟฟ้ามีความร้อนเกินในช่วงระยะเวลาการทำงานระยะสั้น
หากระยะเวลาการทำงานของมอเตอร์ไฟฟ้าน้อยกว่าเวลาที่ใช้ในการทำความร้อนโดยสมบูรณ์อย่างมาก แต่การหยุดชั่วคราวระหว่างช่วงเวลาของการเปิดเครื่องนั้นสั้นกว่าเวลาทำความเย็นโดยสมบูรณ์อย่างมีนัยสำคัญ ภาระระยะสั้นจะเกิดขึ้น
ในทางปฏิบัติควรแยกแยะงานดังกล่าวได้สองประเภท:
ก) โหลดในช่วงเวลาทำงานมีขนาดคงที่ดังนั้นกราฟจึงแสดงเป็นสี่เหลี่ยมสลับกับการหยุดชั่วคราว
b) ภาระในช่วงระยะเวลาการทำงานเปลี่ยนแปลงไปตามกฎหมายที่ซับซ้อนไม่มากก็น้อย
ในทั้งสองกรณี ปัญหาในการเลือกมอเตอร์ไฟฟ้าด้วยกำลังสามารถแก้ไขได้ทั้งในเชิงวิเคราะห์และเชิงกราฟิก ทั้งสองวิธีนี้ค่อนข้างซับซ้อน ดังนั้นจึงแนะนำให้ใช้วิธีแบบง่ายที่มีความยิ่งใหญ่เท่ากัน ซึ่งประกอบด้วยสามวิธี:
ก) กระแสกำลังสองเฉลี่ยรูต;
b) รูทหมายถึงกำลังสองเฉลี่ย
c) รูทหมายถึงโมเมนต์กำลังสอง
การตรวจสอบความสามารถในการรับน้ำหนักเกินทางกลของมอเตอร์ไฟฟ้า
หลังจากเลือกกำลังของมอเตอร์ไฟฟ้าตามสภาวะการทำความร้อนแล้ว จำเป็นต้องตรวจสอบความสามารถในการรับน้ำหนักเกินทางกลของมอเตอร์ไฟฟ้า กล่าวคือ ตรวจสอบให้แน่ใจว่าแรงบิดโหลดสูงสุดตามกำหนดเวลาระหว่างการทำงานและแรงบิดเมื่อสตาร์ทเครื่อง จะไม่เกินค่าแรงบิดสูงสุดตามแค็ตตาล็อก
สำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสและซิงโครนัส ปริมาณของโหลดเกินเชิงกลที่อนุญาตจะถูกกำหนดโดยแรงบิดแม่เหล็กไฟฟ้าที่พลิกคว่ำ เมื่อถึงจุดที่มอเตอร์ไฟฟ้าเหล่านี้หยุด
แรงบิดสูงสุดหลายหลากเมื่อเทียบกับแรงบิดที่ระบุควรเป็น 1.8 สำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสามเฟสที่มีวงแหวนสลิปและอย่างน้อย 1.65 สำหรับมอเตอร์ไฟฟ้ากรงกระรอกตัวเดียวกัน
หลายหลากของแรงบิดสูงสุดของมอเตอร์ไฟฟ้าซิงโครนัสจะต้องไม่ต่ำกว่า 1.65 ที่แรงดันไฟฟ้า ความถี่ และกระแสกระตุ้นที่กำหนด โดยมีตัวประกอบกำลัง 0.9 (ที่กระแสนำ)
การโอเวอร์โหลดที่อนุญาตของมอเตอร์ไฟฟ้ากระแสตรงถูกกำหนดโดยสภาพการทำงาน และตาม GOST นั้นมีช่วงตั้งแต่ 2 ถึง 4 แรงบิด โดยขีดจำกัดล่างหมายถึงมอเตอร์ไฟฟ้าที่กระตุ้นแบบขนาน และขีดจำกัดบนสำหรับมอเตอร์ไฟฟ้าที่กระตุ้นแบบอนุกรม
หากเครือข่ายจ่ายและจำหน่ายไวต่อโหลด จะต้องตรวจสอบความจุเกินพิกัดทางกลโดยคำนึงถึงการสูญเสียแรงดันไฟฟ้าในเครือข่าย
สำหรับมอเตอร์ไฟฟ้าแบบกรงกระรอกแบบอะซิงโครนัสและแบบซิงโครนัส แรงบิดเริ่มต้นหลายหลากต้องมีอย่างน้อย 0.9 (สัมพันธ์กับแรงบิดที่กำหนด)
ในความเป็นจริง แรงบิดเริ่มต้นหลายหลากสำหรับมอเตอร์ไฟฟ้าที่มีกรงกระรอกคู่และร่องลึกนั้นสูงกว่ามากและถึง 2-2.4
เมื่อเลือกกำลังของมอเตอร์ไฟฟ้า ควรคำนึงว่าความถี่ของการเปิดสวิตช์จะขึ้นอยู่กับความร้อนของมอเตอร์ไฟฟ้า ความถี่ในการสลับที่อนุญาตนั้นขึ้นอยู่กับสลิปปกติ แรงบิดการสวิงของโรเตอร์ และหลายหลากของกระแสเริ่มต้น
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสประเภทปกติไม่อนุญาตให้โหลดตั้งแต่ 400 ถึง 1,000 และมอเตอร์ไฟฟ้าที่มีสลิปเพิ่มขึ้น - จาก 1100 ถึง 2700 เริ่มต่อชั่วโมง เมื่อสตาร์ทภายใต้โหลด จำนวนสตาร์ทที่อนุญาตจะลดลงอย่างมาก
กระแสสตาร์ทของมอเตอร์ไฟฟ้าที่มีโรเตอร์แบบกรงกระรอกนั้นมีขนาดใหญ่ และสถานการณ์นี้มีความสำคัญภายใต้เงื่อนไขของการสตาร์ทบ่อยครั้ง และโดยเฉพาะอย่างยิ่งเมื่อมีเวลาในการเร่งความเร็วเพิ่มขึ้น
ตรงกันข้ามกับมอเตอร์ไฟฟ้าที่มีเฟสโรเตอร์ ซึ่งส่วนหนึ่งของความร้อนที่เกิดขึ้นระหว่างสตาร์ทเครื่องจะถูกปล่อยออกมาในลิโน่ เช่น ภายนอกเครื่องจักร ในมอเตอร์ไฟฟ้าแบบกรงกระรอก ความร้อนทั้งหมดจะถูกปล่อยออกมาในตัวเครื่องเอง ซึ่ง ทำให้เกิดความร้อนเพิ่มขึ้น ดังนั้นการเลือกกำลังไฟสำหรับมอเตอร์ไฟฟ้าเหล่านี้จะต้องคำนึงถึงการให้ความร้อนในระหว่างการสตาร์ทหลายครั้ง