Главная задача систем регулирования состоит в том, чтобы стабилизировать параметры процесса на заданном уровне при воздействии внешних возмущающих воздействий, действующих на объект управления. Этим занимаются системы автоматической стабилизации. Другой не менее важной задачей является задача обеспечения программного перехода на новые режимы работы. Решение этой проблемы осуществляется с помощью той же системы стабилизации, задание которой изменяется от программного задатчика.
Структурная схема одноконтурной системы АР объектом управления приведена на рис.1. Основными элементами ее являются: АР - автоматический регулятор, УМ - усилитель мощности, ИМ - исполнительный механизм, РО - регулируемый орган, СОУ - собственно объект управления, Д - датчик, НП - нормирующий преобразователь, ЗД - задатчик, ЭС - элемент сравнения.

Переменные: Yз - задающий сигнал, e - ошибка регулирования, U P - выходной сигнал регулятора, U y - управляющее напряжение, h - перемещение регулирующего органа, Q r - расход вещества или энергии, F - возмущающее воздействие, T - регулируемый параметр, Y ОС - сигнал обратной связи (выходное напряжение или ток преобразователя).
Нормирующий преобразователь выполняет следующие функции:
- преобразует нестандартный сигнал датчика в стандартный выходной сигнал;
- осуществляет фильтрацию сигнала;
- осуществляет линеаризацию статической характеристики датчика с целью получения линейного диапазона.
Для расчетных целей исходную схему упрощают до схемы, показанной на рис.2, где АР - регулятор, ОУ - объект управления.
Выбор канала регулирования
Одним и тем ж выходным параметром объекта можно управлять по разным входным каналам.
При выборе нужного канала управления исходят из следующих соображений:
- Из всех возможных регулирующих воздействий выбирают такой поток вещества или энергии, подаваемый в объект или отводимый из него, минимальное изменение которого вызывает максимальное изменение регулируемой величины, то есть коэффициент усиления по выбранному каналу должен быть, по возможности, максимальным. Тогда, по данному каналу можно обеспечить наиболее точное регулирование.
- Диапазон допустимого изменения управляющего сигнала должен быть достаточен для полной компенсации максимально возможных возмущений, возникающих в данном процессе, то есть должен быть обеспечен запас по мощности управления в данном канале.
- Выбранный канал должен иметь благоприятные динамические свойства, то есть запаздывание t 0 и отношение t 0 /T 0 , где T 0 - постоянная времени объекта, должны быть как можно меньшими. Кроме того, изменение статических и динамических параметров объекта по выбранному каналу при изменении нагрузки или во времени должны быть незначительными.
Основные показатели качества регулирования
К автоматическим системам регулирования предъявляются требования не только по устойчивости процессов регулирования во всем диапазоне нагрузок на объект, но и по обеспечению определенных качественных показателей процесса автоматического регулирования.Ими являются:
- Ошибка регулирования (статистическая или среднеквадратическая составляющие).
- Время регулирования.
- Перерегулирование.
- Показатель колебательности.
Динамический коэффициент регулирования R d , который определяется из формулы

где смысл величин Y 0 и Y 1 ясен из рис.3.

Величина R d характеризует степень воздействия регулятора на процесс, то есть степень снижения динамического отклонения в системе с регулятором и без него.
Величина перерегулирования зависит от вида отрабатываемого сигнала. При отработке ступенчатого воздействия по сигналу задания величина перерегулирования определяется по формуле

где значения величин X m и X y показаны на рис.4.

При отработке возмущающего воздействия величина перерегулирования определяется из соотношения
где значения величин X m и X y показаны на рис.5

Время регулирования - это время, за которое регулируемая величина в переходном процессе начинает отличаться от установившегося значения менее, чем на заранее заданное значение b , гдеb - точность регулирования. Настройки регулятора выбираются так, чтобы обеспечить либо минимально возможное значение общего времени регулирования, либо минимальное значение первой полуволны переходного процесса.
В некоторых системах АР наблюдается ошибка, которая не исчезает даж по истечении длительного интервала времени - это статическая ошибка регулирования -e с.
У регуляторов с интегральной составляющей ошибки в установившемся состоянии теоретически равны нулю, но практически незначительные ошибки могут существовать из-за наличия зон нечувствительности в элементах системы.
Показатель колебательности M характеризует величину максимума модуля частотной передаточной функции замкнутой системы (на частоте резонанса)и, тем самым, характеризует колебательные свойства системы. Показатель колебательности наглядно иллюстрируется на графике рис.6.
Условно считается,что значение М=1,5ё 1,6 является оптимальным для промышленных систем, так как в этом случае s обеспечивается в пределах от 20 до 40%. При увеличении M колебательность в системе возрастает.
В некоторых случаях нормируется полоса пропускания системы w п, которая соответствует уровню усиления в замкнутой системе 0,05. Чем больше полоса пропускания, тем больше быстродействие замкнутой системы. Однако при этом повышается чувствительность системы к шумам в канале измерения и возрастает дисперсия ошибки регулирования.
При настройке регуляторов можно получить достаточно большое число переходных процессов, удовлетворяющих заданным требованиям. Таким образом, появляется некоторая неопределенность в выборе конкретных значений параметров настройки регулятора. С целью ликвидации этой неопределенности и облегчения расчета настроек вводится понятие оптимальных типовых процессов регулирования.
Выделяют три типовых процесса:

где e - ошибка регулирования.

К достоинствам этого процесса можно отнести высокое быстродействие (1-й полуволны) при довольно значительной колебательности. Кроме этого, оптимизация этого критерия по параметрам настройки регулятора может быть выполнена аналитически, численно или путем моделирования (на АВМ).
Типовая структурная схема регулятора
Автоматический регулятор (рис.10) состоит из: ЗУ - задающего устройства, СУ — сравнивающего устройства, УПУ - усилительно-преобразующего устройства, БН - блока настроек.

Задающее устройство должно вырабатывать высокостабильный сигнал задания (установку регулятора) либо изменять его по определенной программе. Сравнивающее устройство позволяет сопоставлять сигнал задания с сигналом обратной связи и тем самым сформировать величину ошибки регулирования e p . Усилительно-преобразующее устройство состоит из блока формирования алгоритма регулирования, блока настройки параметров этого алгоритма и усилителя мощности.
Классиффикация регуляторов
Автоматические регуляторы классифицируются по назначению, принципу действия, конструктивным особенностям, виду используемой энергии, характеру изменения регулирующего воздействия и т.п.
По принципу действия они подразделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действия не используют внешнюю энергию для процессов управления, а используют энергию самого объекта управления (регулируемой среды). Примером таких регуляторов являются регуляторы давления. В автоматических регуляторах непрямого действия для его работы требуется внешний источник энергии.
По роду действия регуляторы делятся на непрерывные и дискретные. Дискретные регуляторы, в свою очередь, подразделяются на релейные, цифровые и импульсные.
По виду используемой энергии они подразделяются на электронные, пневматические, гидравлические, механические и комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы.
По закону регулирования они делятся на двух-и трехпозиционные регуляторы, типовые регуляторы (интегральные, пропорциональные, пропорционально-дифференциальные, пропорционально- интегральные и пропорционально- интегрально- дифференциальные регуляторы - сокращенно И, П, ПД, ПИ и ПИД-регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы. Двухпозиционные регуляторы нашли широкое распространение благодаря своей простоте и малой стоимости.
По виду выполняемых функций регуляторы подразделяются на регуляторы автоматической стабилизации, программные, корректирующие, регуляторы соотношения параметров и другие.
Выбор типа регулятора
Задача проектировщика состоит в выборе такого типа регулятора, который при минимальной стоимости и максимальной надёжности обеспечивал бы заданное качество регулирования.
Для того чтобы выбрать тип регулятора и определить его настройки, необходимо знать:
- Статические и динамические характеристики объекта управления.
- Требования к качеству процесса регулирования.
- Показатели качества регулирования для серийных регуляторов.
- Характер возмущений,действующих на процесс регулирования.
Выбор типа регулятора обычно начинается с простейших двухпозиционных регуляторов и может заканчиваться самонастраивающимися микропроцессорными регуляторами.
Рассмотрим показатели качества серийных регуляторов. В качестве серийных предполагаются непрерывные регуляторы, реализующие законы управления И, П, ПИ и ПИД.
Теоретически, с усложнением закона регулирования качество работы системы улучшается. Известно, что на динамику регулирования наибольшее влияние оказывает величина отношения запаздывания к постоянной времени объекта с. Эффективность компенсации ступенчатого возмущения регулятором достаточно точно может характеризоваться величиной динамического коэффициента регулирования R d , а быстродействие - величиной времени регулирования. Теоретически, в системе с запаздыванием минимальное время регулирования t pvin =2/.
Минимально возможное время регулирования для различных типов регуляторов при оптимальной их настройке определяется таблицей 1.
Таблица 1
Руководствуясь таблицей, можно утверждать, что наибольшее быстродействие обеспечивает закон управления П. Однако, если коэффициент усиления П-регулятора KP мал (чаще всего это наблюдается в системах с запаздыванием), то такой регулятор не обеспечивает высокой точности регулирования, так как в этом случае велика величина статической ошибки. Если KP имеет величину равную 10 и более, то П-регулятор приемлем, а если KP<10 то требуется введение в закон управления интегральной составляющей.
Наиболее распространенным на практик является ПИ-регулятор, который обладает следующими достоинствами:
- Обеспечивает нулевую статическую ошибку регулирования.
- Достаточно прост в настройке, так как настраиваются только два параметра, а именно коэффициент усиления K P и постоянная интегрирования T i . В таком регуляторе имеется возможность оптимизации K p /T i >max, что обеспечивает управление с минимально возможной среднеквадратичной ошибкой регулирования.
- Обладает малой чувствительностью к шумам в канале измерения (в отличие от ПИД-регулятора).

Для наиболее ответственных контуров можно рекомендовать использование ПИД-регулятора, обеспечивающего наиболее высокое быстродействие в системе. Однако следует учитывать, что это условие выполняется только при его оптимальных настройках (настраиваются три параметра). С увеличением запаздывания в системе резко возрастают отрицательные фазовые сдвиги, что снижает эффект действия дифференциальной составляющей регулятора. Поэтому качество работы ПИД-регулятора для систем с большим запаздыванием становится сравнимо с качеством работы ПИ-регулятора. Кроме этого, наличие шумов в канале измерения в системе с ПИД-регулятором приводит к значительным случайным колебаниям управляющего сигнала регулятора,что увеличивает дисперсию ошибки регулирования. Таким образом, ПИД-регулятор следует выбирать для систем регулирования с относительно малым уровнем шумов и величиной запаздывания в объекте управления. Примерами таких систем являются системы регулирования температуры.
При выборе типа регулятора рекомендуется ориентироваться на величину отношения запаздывания к постоянной времени в объекте t /T. Если t /T< 0,2, то можно выбрать релейный, непрерывный или цифровой регуляторы. Если 0,2 < t /T< 1, то должен быть выбран непрерывный или цифровой, ПИ или ПИД-регулятор. Если t /T >1, то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот ж регулятор рекомендуется применять и при меньших отношениях t /T.
Формульный метод определения настроек регулятора
Метод используется для быстрой приближенной оценки значений параметров настройки регулятора для трех видов оптимальных типовых процессов регулирования.

Метод применим как для статических объектов с самовыравниванием (таблица 2), так и для объектов без самовыравнивания (таблица 3).
Примечание:T,t ,K оу - постоянная времени, запаздывание и коэффициент усиления объекта.
В этих формулах предполагается, что настраивается регулятор с зависимыми настройками, передаточная функция которого имеет вид:

K p - коэффициент усиления регулятора; T i -время изодрома (постоянная интегрирования регулятора); T d -время предварения (постоянная дифференцирования).
Расчёт настроек по частотным характеристикам объекта
Существует специальная аппаратура для экспериментального определения амплитуднофазовой характеристики (АФХ) объекта управления: Эту характеристику можно использовать для расчета настроек ПИ-регулятора, гд главным критерием является обеспечение заданных запасов устойчивости в системе.
Запасы устойчивости удобно характеризовать показателем колебательности системы M, величина которого в системе с ПИ-регулятором совпадает с максимумом амплитудно-частотной характеристики замкнутой системы. Для того чтобы этот максимум не превышал заданной величины, АФХ разомкнутой системы не должна заходить внутрь окружности с центром P 0 и радиусом R, где

Можно доказать, что оптимальными по минимуму среднеквадратичной ошибки регулирования настройками будут такие, при которых система с показателем колебательности MЈ M 1 будет иметь наибольший коэффициент при интегральной составляющей, чему соответствует условие K p /T i >min.
В связи с этим расчет оптимальных настроек состоит из двух этапов:
- Нахождение в плоскости параметров K p и T i , границы области, в которой система обладает заданным показателем колебательности M 1 .
- Определением на границе области точки, удовлетворяющей требованию K p /T i .
Расчёт настроек по частотным характеристикам объекта. Методика расчёта настроек ПИ регулятора по АФХ объекта
Экспериментальные методы настройки регулятора
Для значительного числа промышленных объектов управления отсутствуют достаточно точные математические модели, описывающие их статические и динамические характеристики. В то ж время проведение экспериментов по снятию этих характеристик весьма дорого и трудоемко.
Экспериментальный метод настройки регуляторов не требуют знания математической модели объекта. Однако предполагается, что система смонтирована и может быть запущена в работу, а также существует возможность изменения настроек регулятора. Таким образом, можно проводить некоторые эксперименты по анализу влияния изменения настроек на динамику системы. В конечном итоге гарантируется получение хороших настроек для данной системы регулирования.
Существуют два метода настройки - метод незатухающих колебаний и метод затухающих колебаний.
Метод незатухающих колебаний
В работающей системе выключаются интегральная и дифференциальная составляющие регулятора (T i =Ґ ,T d =0), то есть система переводится в закон регулирования П.
Путем последовательного увеличения K p с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом T kp . Это соответствует выведению системы на границу колебательной устойчивости. При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора K kp и периода критических колебаний в системе T kp . При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения.
По значениям T kp и K kp рассчитываются параметры настройки регулятора:
- П-регулятор: K p =0,55 K kp ;
- ПИ-регулятор: K p =0,45 K kp ; T i =T kp /1,2;
- ПИД-регулятор: K p =0,6 K kp ; T i =T kp /2; T d =T kp /8.
Расчет настроек регулятора можно производить по критической частоте собственно объекта управления w п. Учитывая, что собственная частота Ґ п ОУ совпадает с критической частотой колебаний замкнутой системы с П-регулятором, величины T kp и K kp могут быть определены по амплитуд и периоду критических колебаний собственно объекта управления.
При выведении замкнутой системы на границу колебательной устойчивости, амплитуда колебаний может превысить допустимое значение, что в свою очередь приведет к возникновению аварийной ситуации на объекте или к выпуску бракованной продукции. Поэтому не все системы управления промышленными объектами могут выводиться на критический режим работы.
Метод затухающих колебаний
Применение этого метода позволяет настраивать регуляторы без выведения системы на критические режимы работы. Так же, как и в предыдущем методе, для замкнутой системы с П-регулятором путем последовательного увеличения KP добиваются переходного процесса отработки прямоугольного импульса по сигналу задания или возмущения с декрементом затухания D=1/4. Далее определяется период этих колебаний T k и значения постоянных интегрирования и дифференцирования регуляторов T i ,T d .
- Для ПИ-регулятора:T i =T k /6;
- Для ПИД-регулятора:T i =T k /6;T d =T k /1,5.
После установки вычисленных значений T i и T d на регуляторе необходимо экспериментально уточнить величину K P для получения декремента затухания D=1/4. С этой целью производится дополнительная подстройка K P для выбранного закона регулирования, что обычно приводит к уменьшению K P на 20 –30%. Большинство промышленных систем регулирования считаются качественно настроенными, если их декремент затухания D равен 1/4 или 1/5.
Регулирование при наличии шумов
Наличие высокочастотных шумовых составляющих в измерительном сигнале приводит к случайным колебаниям исполнительного механизма системы, что увеличивает дисперсию ошибки регулирования и снижает точность регулирования. В некоторых случаях сильные шумовые составляющие могут привести систему к неустойчивому режиму работы (стохастическая неустойчивость).
В промышленных системах в измерительных цепях часто присутствуют шумы, связанные с частотой питающей сети. В связи с этим важной задачей является правильная фильтрация измерительного сигнала, а также выбор нужного алгоритма и параметров работы регулятора. Для этого используются фильтры низкой частоты высокого порядка (5 –7), имеющие большую крутизну спада. Их иногда встраивают в нормирующие преобразователи.
Таким образом, главной задачей регулятора является компенсация низкочастотных возмущений. При этом, с целью получения минимальной дисперсии ошибки регулирования, высокочастотные помехи должны быть отфильтрованы. Однако, в общем случае, эта задача противоречивая, так как спектры возмущения и шума могут накладываться друг на друга. Это противоречие разрешается с помощью теории оптимального стохастического управления, которая позволяет добиться хорошего быстрод йствия в системе при минимально возможной дисперсии ошибки регулирования. Для уменьшения влияния помех в практических ситуациях применяются два способа, основанных на:
- уменьшении коэффициента усиления регулятора K p , то есть, фактически, переход на интегральный закон регулирования, который малочувствителен к шумам;
- фильтрации измеряемого сигнала.
Методы настройки двухсвязных систем регулирования
Из общего числа систем регулирования около 15% составляют двухсвязные системы регулирования (рис.11). В таких системах даже при наличии устойчивой автономной работы двух регуляторов вся система может стать неустойчивой за счет действия перекрестной связи в объекте управления.

Объект управления в двухсвязной системе представлен в Р-канонической форме. Удобство такого представления заключается в том, что путем активного эксперимента можно определить все передаточные функции по соответствующим каналам. Промежуточные сигналы x 1 , x 2 , x 3 , x 4 обычно недоступны для измерения, поэтому управление ведется по вектору выхода Y:
На практике довольно большое число систем являются двухсвязными. Для объективной настройки регуляторов двухсвязных систем формируется критерий качества вида:
где y 1 и y 2 - коэффициенты веса (штрафа), J1 и J 2 - критерии качества первого и второго контуров.
Путем перераспределения коэффициентов веса y 1 и y 2 можно выделить более важный контур, качество процессов управления в котором должно быть более высоким. Например, если первый контур должен обеспечивать более высокую точность работы, то y 1 требуется увеличить.
Задача настройки регулятора состоит в том, чтобы при заданных y 1 и y 2 обеспечить минимальное значение J 0 системы, где

Рассмотрим различные методы настройки регуляторов в двухсвязных системах.
Метод автономной настройки регуляторов
В этом случае настройка регуляторов Р 1 и Р 2 производится последовательно, без учета взаимных влияний контуров. Процедура настройки осуществляется следующим образом:
- регулятор Р 2 переводится в ручной режим работы;
- настраивается регулятор Р 1 так, чтобы критерий J 1 был минимален;
- отключается настроенный регулятор Р 1 и включается регулятор Р 2 ;
- настраивается Р 2 , обеспечивая минимум J 2 ;
- оба регулятора включаются в работу.
- наблюдается малое взаимное влияние контуров;
- быстродействие одного контура значительно выше другого (контуры разнесены по частотам);
- в перекрестных связях одна из передаточных функций имеет коэффициент передачи значительно меньше, чем другая, то есть наблюдается одностороннее влияние.
Метод итеративной настройки регуляторов
Этот метода аналогичен предыдущему, но здесь осуществляется многократная настройка регуляторов Р 1 и Р 2 (последовательная подстройка) с целью обеспечения минимального значения критерия качества J 0 всей системы.
Следует учитывать, что только метод итеративной настройки регуляторов обеспечивает качественную работу двухсвязной системы даж при наличии сильных перекрестных связей. Это объясняется тем, что оптимизация критерия качества J 0 системы происходит при включенных Р 1 и Р 2 .
Данный метод часто применяется при аналоговом и цифровом моделировании двухсвязных систем, так как в реальных условиях он весьма трудоемок.
Метод аналитического конструирования регуляторов
Этот метод позволяет синтезировать многомерный регулятор, учитывающий в своей структуре взаимосвязь переменных в объекте управления. Синтез ведется с помощью методов теории оптимального или модального управления при описании объекта в пространстве состояний.
Структурная схема оптимального регулятора состояния, содержащего наблюдающее устройство, приведена на рис.12. Схема содержит следующие элементы: Н - наблюдатель, ОУ - объект управления, МОУ - модуль объекта управления, ОРС - оптимальный регулятор состояния, Е Н - ошибка наблюдения, X М - вектор состояния модели, X зад.- вектор задания, U - вектор входа ОУ, Y - вектор выхода ОУ, Y М - вектор выхода модели.


Оптимальный регулятор состояния, являясь наиболее совершенным типом регулятора, требует измерения всех компонентов вектора состояния объекта. Для получения их оценок (x) используется динамическая модель объекта (цифровая или аналоговая), подключенная параллельно исходному ОУ. Для обеспечения равенства движений в реальном объекте и модели используется наблюдатель, который, сравнивая движения векторов Y и Y М, обеспечивает их равенство (E H >0). Параметры регулятора состояния рассчитываются методамианалитического конструирования регуляторов путем минимизации интегрального квадратичного критерия качества
![]()
где Q и R - матрицы штрафов (весов) на компоненты вектора состояния и вектора управления.
За основу публикации взят курс лекций, читаемый профессором В.М.Мазуровым на каферде АТМ Тульского государственного университета
Законы автоматического регулирования
Может оказаться, что одни автоматические системы хорошие, а другие плохие, то казалось бы всегда нужно использовать только самые хорошие, а о других - плохих не следовало бы даже. и говорить. Сначала необходимо разобраться с тем, что считать хорошие, а что плохие автоматические системы. Вообще-то хороший автоматический регулятор это такой, который обеспечивает получение достаточно хороших характеристик процесса автоматического регулирования и вместе с тем прост по своей конструкции. Нужно иметь в виду и то, что различные объекты регулирования имеют неодинаковые характеристики, и поэтому автоматический регулятор, обеспечивающий удовлетворительную работу одного из них, может быть непригодным для другого. Это тоже необходимо учитываться при выборе типа системы автоматического регулирования. Поэтому в различных случаях можно считать лучшими различные автоматические системы. В некоторых случаях можно обойтись простейшими, а в других - требуются более сложные системы автоматического регулирования.
Задачей автоматической системы, как уже отмечалось, является поддержание заданного значения регулируемой величины у(t) или изменение ее по определенному закону, который заранее задается или в зависимости от изменения внешних условий.
Программы могут быть функциями времени у = у(t) или параметрическими у = у(s1 , s2 , . . . t).
Примером временной программы может служить программа изменения регулируемой величины, обеспечивающая заданный режим начального разгона объекта регулирования при пуске до наступления режима нормальной эксплуатации. Например, регулятор частоты вращения коленчатого вала дизеля тепловоза. Во всех подобных устройствах в составе автоматического регулятора или автоматической системы имеется программное устройство, в которое заранее заложена требуемая временная программа.
Примером параметрической программы автоматического регулирования может служить задание требуемого значения скорости движения локомотива с поездом не во времени, а в зависимости от пройденного пути, чтобы прибыть в заданное время на данную станцию.
Большинство известных систем автоматического регулирования работают по принципу отклонения. Это значит, что она вступает в действие после того, как произошло отклонение регулируемой величины от заданного значения, как говорят, при наличии рассогласования Dx(t)между заданным x(t) и фактическим y(t) значением регулируемой величины.
Для наиболее часто применяемых систем автоматического регулирования иногда используются названия, отражающие их особенности, связанные со способом формирования в автоматической системе управляющих воздействий, которые передаются исполнительному устройству.
Пусть Dx(t), представляет отклонение регулируемой величиныy(t) от заданного значения x(t), аh(t) воздействие со стороны автоматической системы на объект регулирования. Величина Dx(t)может изменяться в зависимости от времени по-разному.
Различают линейные и нелинейные законы регулирования.
Все законы автоматического регулирования можно разделить на:
1. Простейшие:
- пропорциональный;
- интегральный;
- дифференциальный ;
2. Промышленные:
- пропорционально-интегральный;
- пропорционально-дифференциальный;
- пропорционально-интегрально-дифференциальный.
Для линейных законов автоматического регулирования детально разработаны многочисленные прикладные методы исследования, анализа и синтеза, различные расчетные и экспериментальные приемы определения устойчивости, точности и качества работы, а также схемы технических устройств их формирования и реализации.
Пропорциональный закон . Чаще всего такой функциональной зависимостью является простая пропорциональная зависимость, при которой регулируемая величина y(t) должна воспроизводить обычно на более высоком уровне мощности изменения заданной величины x(t) или рассогласования Dx(t).
|

Если считать, что h(t)изменяется пропорциональноDx(t), то такой регулятор называютпропорциональнымили П-регулятором. Выражение пропорциональной зависимости между величинами h(t) и Dx(t) имеет следующий видh(t) = k Dx(t), где k - коэффициент усиления регулятора.
Пропорциональным автоматическим регулятором может служить обычное усилительное звено с изменяемым коэффициентом усиления, включенное в отрицательную обратную связь по отношению к объекту регулирования.
Проследим за тем, что происходит с исполнительным органом, когда регулируемая величина y(t)скачком изменяется на Dyи принимает значение y + Dy. В простейшем регуляторе, работающем по принципу отклонения, в процессе регулирования величина h(t) тем больше, чем больше отклонение Dx(t).
Принцип работы пропорционального регулятора
Как можно заключить из приведенной формулы, что нормальное функционирование данного регулятора возможно только в случае, когда Dx(t) > 0. Таким образом, автоматическая система имеет постоянную (статическую) ошибку, которую называют статизмом регулятора, а системаавтоматического регулирования называется статической системой.
Статизм выражается в процентах и определяется по формуле:

|

В статической по отношению к управляющему воздействию автоматической системе при воздействии, стремящемся с течением времени к некоторому значению, ошибка также стремится к постоянному значению, зависящему от значения управляющего воздействия, т. е. статическая автоматическая система не может обеспечить постоянства регулируемой величины при переменной во времени нагрузке.
Говоря о статической ошибке регулирования, считают, что после каждого изменения внешнего возмущения или отклонения от заданного режима работы, которое вызывается другими причинами, снова устанавливается постоянное значение регулируемой величины, пусть не то, что было раньше, но постоянное, и остается дальше неизменным.
Статическая автоматическая система имеет нулевой порядок астатизма. Это означает, что в прямой цепи автоматического регулирования нет интегрирующих звеньев. Она может содержать только статические звенья: усилительные, форсирующие или колебательные.
Для повышения точности поддержания заданного значения регулируемой величины, как следует из приведенного уравнения, увеличивают коэффициент усиления k. Однако при этом может возрасти динамическая погрешность, так как даже малое изменение регулируемой величины приводит к значительному изменению управляющего воздействия h(t), что может неблагоприятно сказаться на характеристиках переходных процессов, вызывая дополнительные колебания регулируемой величины.
|

Интегральный закон . С тем, чтобы исключить указанный недостаток систем автоматического регулирования прямого действия, были созданы автоматические системы непрямого действия, в которых между чувствительным элементом и исполнительным органом включается дополнительное звено (в большинстве случаев выполняющее операцию интегрирования погрешности регулирования Dx(t), работающее с независимым источником энергии). Это может быть гидравлический или пневматический сервомотор, электродвигатель постоянного или переменного тока и т. п. В интегральных регуляторах (И-регуляторах) управляющее воздействие формируется по следующему закону

Интегральным регулятором может служить интегрирующее звено с переменным передаточным коэффициентом в обратной связи.
Принцип работы интегрального регулятора
Переходный процесс в автоматической системе с И-регулятором характеризуется отсутствием статической ошибки регулирования и наибольшим значением отклонения регулируемой величины от установившегося значения по сравнению с другими законами регулирования. И-регуляторы в практике автоматического регулирования не применяются, т. к. они обладают плохими динамическими качествами и в большинстве случаев способствуют возникновению в автоматической системе незатухающих колебаний.
|
Пропорционально-интегральный закон . Инженеры и ученые давно поняли, что статическая автоматическая система не может быть абсолютно точной, если иметь в виду сведение к нулю статической ошибки, а интегральные регуляторы способствуют возникновению колебательных режимов. Тогда начались поиски способов улучшения работы автоматических систем. Было замечено, что отрицательное влияние на динамические свойства автоматической системы оказывают инерционные элементы, особенно в регуляторах прямого действия.
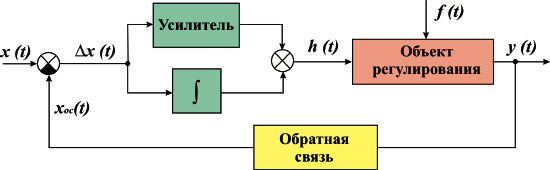
В процессе регулирования пропорционально-интегральной автоматической системы (ПИ-регуляторы) осуществляется два действия: одно, характерное для П-регулятора, следовательно, можно говорить о П-составляющей процесса регулирования, и второе, осуществляющееинтегрирование величины рассогласования Dx(t) интегральная составляющая.
В ПИ-регуляторах регулирующее воздействие формируется по следующему закону.

Пропорционально-интегральный закон регулирования представляет собой параллельное соединение пропорциональной и интегральной составляющих.
Пропорционально-интегральный регулятор сочетает в себе достоинства пропорциональных и интегральных законов автоматического регулирования, а именно: пропорциональная составляющая обеспечивает достаточное быстродействие регулятора, а интегральная составляющая ликвидирует статическую ошибку регулирования.
В начале процесса автоматического регулирования основную роль играет пропорциональная составляющая, так как интегральная составляющая зависит не только от абсолютного значения рассогласования между заданным и фактическим значением регулируемой величины, но и от времени. С увеличением времени возрастает роль интегральной составляющей, обеспечивающей устранение статической ошибки.
Подбором коэффициентов k1 и k2 можно изменять удельный вес каждой составляющей.
При использовании такой автоматической системы полностью устраняется статическая погрешность регулирования. Автоматическая система является астатической, в которой Dx(t) = 0.
Астатические системы могут быть первого, второго и более высокого порядка астатизма.
Астатическая система первого порядка не имеет ошибки по положению, однако имеют постоянную ошибку по скорости и возрастающую ошибку по ускорению.
Астатическая система второго порядка не имеет ошибок по положению и по скорости, однако имеют постоянную ошибку по ускорению.
Автоматическая система будет астатической по отношению к управляемому воздействию, если при внешнем воздействии, стремящемуся к установившемуся значению, ошибка стремится к нулю независимо от значения внешнего воздействия. Статические системы обычно имеют менее сложное конструктивное решение, чем астатические. Они обладают погрешностью в поддержании постоянства значения регулируемой величины при разных внешних нагрузках. Изменение регулируемой величины, которое вызывает у статической системы перемещение управляемого органа из одного предельного положения в другое, является важнейшей характеристикой статической системы и называется его неравномерностью. Отношение этой неравномерности к номинальному значению регулируемой величины называют степенью неравномерности (коэффициентом статизма или статизмом).
Если иметь в виду отсутствие статической погрешности регулирования, то такая автоматическая система является абсолютно точной. Но, как показал опыт, при такой схеме построения автоматической системы трудно получить удовлетворительные динамические качестварегулирования. Это обусловлено тем, что к положению нового равновесного состояния рассогласование Dx(t) должно приближаться с нулевой скоростью. Иначе в автоматической системе возникают незатухающие колебания регулируемой величины. В общем возможности применения таких автоматических систем весьма ограничены.
В любом автоматическом регуляторе имеется внутренняя обратная связь, благодаря которой золотник принудительно возвращается в положение перекрыши, т. е. в равновесное состояние. Такой регулятор обеспечивает хорошие динамические свойства, но при его использовании возникает статическая ошибка регулирования.
Астатическая система первого порядка имеет один интегратор в прямой цепи регулирования. После завершения переходного процесса точность регулирования обеспечивается благодаря свойствам интегратора как запоминающего устройства (память идеального интегратора бесконечна).
Введение в автоматическую систему двух интегрирующих звеньев позволяет получить управление по ускорению. Система с астатизмом второго порядка благодаря свойством интеграторов точно воспроизводит и установившемся процессе постоянные и линейно возрастающие воздействия. Воздействие, изменяющееся с постоянным ускорением, автоматическая система воспроизводит (копирует) с постоянной динамической ошибкой, называемой ошибкой по ускорению.
Таким образом, порядок астатизма по отношению к задающему воздействию легко определить непосредственно по функциональной схеме автоматической системы. Для этого автоматическую систему путем структурных преобразований следует привести к одноконтурной и определить количество интегрирующих звеньев между входом и выходом.
|
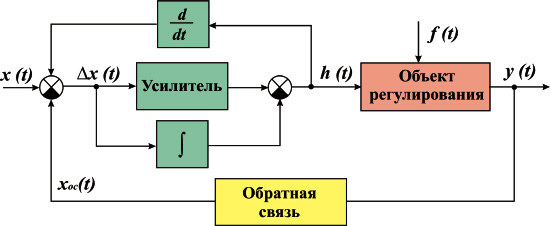
Пропорционально-интегрально-дифференциальный закон. Положительные качества всех рассмотренных автоматических систем объединяет пропорционально-интегрально-дифференциальный закон регулирования или ПИД-регуляторы. Мысль инженеров работала над тем, как устранить отмеченные выше недостатки, или если их полностью устранить нельзя, то хотя бы уменьшить их вредное влияние на процесс регулирования. Было решено использовать воздействия по производной сигнала рассогласования.
ПИД-регулятор сочетает в себе достоинства всех простейших законов автоматического регулирования:
- высокое быстродействие благодаря наличию пропорциональной составляющей;
- высокую точность благодаря интегральной составляющей;
- малое время переходного процесса благодаря дифференциальной составляющей.
Иногда говорят, что такие регуляторы работают с предварением, т. е. он вступает в действие тогда, когда еще отклонение не произошло.
Благодаря воздействию по производной осуществляется предварение формирования управляющего воздействия, а благодаря сигналу по интегралу снимается статическая погрешность регулирования.
В этом случае управляющее воздействие формируется согласно закону

На установившихся режимах работы всегда, как бы ни изменялись возмущения, регулируемая величина остается неизменной. Этот регулятор в начале переходного процесса, вызванном изменением нагрузки, работает как ПИ-регулятор, что является благоприятным для динамических свойств системы, а затем в ходе переходного процесса, действие обратной связи ослабевает, что позволяет работать без статической погрешности. Такая обратная связь называется гибкой обратной связью.
Принцип работы пропорционально-интегрально-дифференциального регулятора
Необходимо отметить, что применение автоматических регуляторов с дифференциальными составляющими, несмотря на их достоинства, не всегда целесообразно, а иногда и недопустимо. Так, для объектов с большим запаздыванием по каналу регулирования бесполезно вводить воздействие по производной от регулируемой величины, так как этот сигнал будет поступать в автоматический регулятор по истечении времени запаздывания после прихода возмущения, за которые в объекте регулирования могут накопиться большие отклонения. В таких случаях ПИД-регулятор может привести к неустойчивости автоматической системы
Использование нелинейных законов автоматического регулирования, определяемых разнообразными нелинейными уравнениями состояния значительно расширяет возможности целесообразного изменения качества процессов автоматического регулирования и точности работы автоматических систем. Это должно быть ясно из общих принципиальных соображений, так как область нелинейных уравнений значительно богаче и разнообразнее, чем линейных.
Несмотря на то, что общей теории нелинейных законов автоматического регулирования нет, исследования и опыт применения отдельных частных видов этих законов говорят об их большой практической эффективности.
Важным отличием нелинейных законов автоматического регулирования от линейных является то, что они придают автоматической системе принципиально новые свойства. Если при линейном законе автоматического регулирования всегда вырабатывается сигнал, пропорциональный входной переменной или ее производной, то при нелинейном законе может существенно изменяться сам характер действия автоматической системы на объект регулирования в зависимости от величины входного воздействия. Другими словами, если для линейных автоматических систем изменение размера отклонения Dx(t) - это изменение только масштаба, но не формы процессов, то в нелинейной автоматической системе при этом может существенно изменяться и форма процессов, вплоть до принципиальных качественных изменений картины происходящих процессов. Эти особые свойства нелинейных законов можно выгодно использовать в технике автоматического регулирования.
Нелинейные законы
автоматического регулирования разделяют на:
- функциональные нелинейные законы автоматического регулирования;
- логические нелинейные законы автоматического регулирования;
- оптимизирующие нелинейные законы автоматического регулирования;
- параметрические нелинейные законы автоматического регулирования.
Рассмотрим отдельно каждый из указанных нелинейных законов автоматического регулирования.
Функциональные нелинейные законы автоматического регулирования предполагают изменение управляющего воздействия h(t) на объект регулирования, выражающегося в виде нелинейной функции от отклонения регулируемой величины Dx(t). Данный класс автоматических систем может содержать в себе как статические, так и динамические нелинейности
Нелинейный закон автоматического регулирования может включать нелинейности от выходной величины у(t). Подобные динамические члены нелинейного закона автоматического регулирования различно влияют на демпфирующие свойства автоматической системы в переходных режимах в зависимости от скорости отклонения регулируемой величины Dx(t). Они могут существенно улучшить динамическую точность автоматической системы в различных режимах вынужденного движения, воспроизведения различных форм задаваемых входных сигналов. а также при случайных воздействиях.
Отметим также, что функциональные нелинейные законы автоматического регулирования могут быть связаны не только с изменением параметров в зависимости от размеров входных воздействий, но и с изменением структуры автоматической системы.
|

Логические нелинейные законы автоматического регулирования реализуются с помощью не функциональных, а более сложных логических устройств. Построение простейшего логического нелинейного закона автоматического регулирования может сводиться к выбору того или иного способа обработки сигнала рассогласования Dx(t) в зависимости от поставленных перед автоматической системой задач и требуемого качества регулирования.
Логические нелинейные законы автоматического регулирования могут быть связаны также с изменением структуры автоматической системы. Например, при помощи логического устройства можно включать и выключать сигналы управления по первой и второй производными или интегралу, в зависимости от сочетания значений отклонения сигнала рассогласования Dx(t).
В общем случае срабатывание переключающего устройства в автоматической системе с переменной структурой может происходить от нескольких входных величин. При этом кроме основной нелинейности, возникающей за счет переключения структуры, дополнительно могут иметься какие-либо нелинейные свойства в отдельных других звеньях автоматического регулятора или объекта регулирования.
Оптимизирующие нелинейные законы автоматического регулирования основаны на использовании классических вариационных методов или на их основе принципа максимума, или методов динамического программирования таким образом, чтобы автоматическая система имела максимум быстродействия или минимум ошибки, или же экстремум другой величины с учетом ограничений, накладываемых в реальной автоматической системе на отдельные координаты.
Как правило, при этом приходят к нелинейным законам автоматического регулирования, хотя можно оптимизировать коэффициенты линейного закона. Часто оптимальный закон автоматического регулирования состоит в переключении управляющего воздействия h(t) с одного максимально возможного значения на другое. Моменты переключения определяются сложными комбинациями значений нескольких переменных и их производных.
Параметрические нелинейные законы автоматического регулирования формируют управляющее воздействие в виде нелинейной функции текущих координат, в которых задается параметрическая программа.
14. Автоматические регуляторы. Классификация регуляторов по виду используемой энергии, законам регулирования, характеру регулирующего воздействия. Область применения, достоинства и недостатки.
Автоматические регуляторы.
Устройство, с помощью которого в системах регулирования обеспечивается автоматическое поддержание технологической величины около заданного значения, называют автоматическим регулятором. Регулятор является одним из элементов замкнутой системы.
На вход автоматического регулятора подаются текущее у т и заданное и 3 значения регулируемой величины. Рассогласование между ними у т -и 3 приводит к изменению выходной величины регулятора х р
Эту зависимость в относительных величинах (при и = 0)
называют законом регулирования . Каждый конкретный регулятор имеет свой закон регулирования.
Классификация регуляторов.
По наличию подводимой энергии регуляторы подразделяют на не имеющие вспомогательный источник энергии и имеющие таковой. У регуляторов без вспомогательного источника энергии для перемещения регулирующего органа используется энергия регулируемой среды. Они просты по конструкции, надежны в работе, не требуют внешних источников энергии, но имеют ограниченную мощность для приведения в действие регулирующего органа. Такие регуляторы применяют в тех случаях, когда для приведения в действие регулирующего органа не требуются большие усилия и для этого достаточно мощности измерительного устройства, а также, если к качеству переходного процесса не предъявляются жесткие требования.
У регуляторов с вспомогательным источником энергии перемещение регулирующего органа осуществляется дополнительным приводом, работающим от внешнего источника. Они требуют дополнительной внешней энергии и имеют более сложную конструкцию. Эти регуляторы способны обеспечить высокое качество регулирования.
По виду используемой энергии регуляторы делят на гидравлические, электрические и пневматические.
По виду регулируемой величины различают регуляторы температуры, давления, расхода, уровня, концентрации и других величин.
По характеру действия регуляторы подразделяются на имеющие прямую и обратную характеристики. У первых из них возрастание входного сигнала обусловливает увеличение выходной величины, а у вторых - наоборот.
По характеру регулирующего воздействия можно выделить регуляторы прерывистого и непрерывного действия. У регуляторов прерывистого действия непрерывному изменению входной величины соответствует прерывистое изменение регулирующего воз действия хотя бы в одном из элементов регулятора, существенным образом влияющее на работу регулятора в целом. В свою очередь они делятся на позиционные , а также импульсные . У регуляторов непрерывного действия непрерывному изменению входной величины соответствует непрерывное изменение его выходной величины.
По закону регулирования регуляторы непрерывного действия делят на интегральные, пропорциональные, пропорционально-интегральные, пропорционально-дифференциальные и пропорционально – интегрально - дифференциальные. В настоящее время при автоматизации химических предприятий используются позиционные регуляторы и в большей мере регуляторы непрерывного действия.
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
Управление, сопровождающееся непрерывным контролем, называют регулированием, а параметр, которым необходимо управлять, т. е. регулировать, - регулируемой величиной.
Регулирование, при котором управление осуществляется различными устройвами без вмешательства человека, называют автоматическим регулированием, а совокупность устройств, состоящих из измериельного элемента (первичного преобразователя), исполнительного механизма и регулирующего органа, называют автомашинным регулятором.
Система автоматического регулирования (рис. 1) представит собой совокупность отдельных элементов, направленно действующих друг на друга . В сравнивающем устройстве происходит сравнение текущего значения регулируемой величины X, которое поступает по главной обратной связи, с ее заданным значением X 0 .
Рис. 1 Схема системы автоматического регулирования
КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
Регуляторы разделяются по следующим признакам.
1.. По способу действия : регуляторы прямого и непрямого (косвенного) действия. У регуляторов прямого действия регулирующий орган перемещается за счет энергии Самого объекта, воздействующего на чувствительный элемент. У регуляторов непрямого действия регулирующий орган перемещается за счет дополнительного источника энергии (электроэнергия, сжатый воздух, жидкость под давлением).
2. По роду действия : регулятор прерывистого (дискретного) и непрерывного действия.
В регуляторах непрерывного действия непрерывному изменению регулируемого параметра соответствует непрерывное перемещение регулирующего органа, между входной и выходной величинами существует непрерывная функциональная связь.
В регуляторах прерывистого действия непрерывной функциональной связи нет. Прерывистые системы можно разделить на две основное группы: релейные и импульсные.
Релейной системой автоматического регулирования называется такая система, которая в своем составе среди основных элементов имеет хотя бы один релейный элемент. Под релейным элементом подразумевается такой элемент системы, в котором непрерывному изменению входной величины соответствует скачкоообразное изме-
нение выходной величины, появляющейся лишь при вполне определенных значениях входной величины (электромагнитное реле).
Импульсной системой автоматического регулирования называется такая система, которая в своем составе имеет хотя бы один-импульсный элемент. Импульсный элемент преобразует непрерывное входное воздействие в ряд кратковременных импульсов,появ-ляющихся через определенные промежутки времени.
3. По роду энергии : электрические пневматические, гидравлические, электрогидравлические и электропневматические.
По закону регулирования :
а) пропорциональнее регуляторы, или П-регуляторы (статические);
б) интегральные регуляторы или И-регуляторы (автоматические);
в) пропорционально – интегральные регуляторы, или ПИ-регуляторы (изодромные);
г) пропорционально-дифференциальные регуляторы, или ПД-регуляторы (пропорциональные регуляторы с предварением);
д) пропорционально - интегрально-дифференциальные регуляторы, или
ПИД-регуляторы (изодромные регуляторы с предварением);
По назначению : регуляторы температуры, давления, расхода и т. д.
В зависимости от выполняемой функции: регуляторы соотношения, программные, самонастраивающиеся" стабилизирующие.
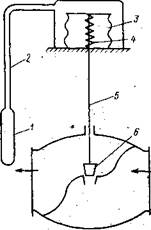
8. Регулятор температуры прямого действия. Регулятор, у которого регулирующий орган перемещается за счет энергий самого объекта, воздействующего на чувствительный элемент, называется регулятором прямого действия. Системы регулирования, использующие регуляторы прямого действия, называются системами прямого регулирования.
Рассмотрим работу регулятора температуры прямого действия типа РПД (рис. 1. Этот регулятор состоит из термометрической системы и клапана.
Термометрическая система регулятора представляет собой паровой манометрический термометр, в состав которого входят термобаллон 1, капилляр 2 и сильфон 3. Термометрическая система частично заполнена низкокипящей жидкостью, температура кипения которой ниже нижнего предела регулируемой температуры.
При погружении термобаллона в измеряемую среду в термометрической системе устанавливается давление паров рабочей жидкости, величина которого соответствует температуре измеряемой среды. Давление, возникающее в термобаллоне, передается через пар рабочей жидкости по капилляру к сильфону. В сильфоне развивается усилие, пропорциональное его эффективной площади; это усилие уравновешивается усилием пружины 4. Если температура регулируемой среды выше заданного значения, то усилие, развиваемое сильфоном 5, больше усилия пружины 4, вследствие чего сильфон сжимается и при помощи штока 5 перемещает золотник 6 регулирующего клапана вниз. При этом проходное сечение клапана и количество нагревающего вещества, проходящего через клапан, уменьшаются; в результате температура среды понижается и достигает заданного значения. При понижении температуры регулируемой среды сильфон растягивается и клапан приоткрывается, увеличивая подачу нагревающего вещества, вследствие чего температура повышается до заданного значения.
Регуляторы, которые воздействуют на регулирующий орган через усилительное устройство и исполнительный механизм, питаемый от внешнего источника энергии, называются регуляторами непрямого действия .
В регуляторе непрямого действия при изменении регулируемой величины усилие или энергия, возникающие в чувствительном элементе, приводят в действие впомогательное устройство, перемещающее регулирующий орган за счет энергии постороннего источника (электрического тока, жидкости под давлением, сжатого воздуха).
Системы регулирования, использующие регуляторы непрямого действия, называются "системами непрямого регулирования.
На рис. 1 приведена схема непрямого регулирования уровня жидкости в сосуде. Измерительное устройство (поплавок 1) при помощи рычагов связано с подвижным электрическим контактом.2. Подвижный контакт может замыкаться с одним из неподвижных контактов: Б (больше) и М (меньше). В зависимости от того, с каким из этих контактов замкнется подвижный контакт, электродвигатель 3 вращается в ту или другую сторону. Через червячный редуктор и систему рычагов электродвигатель открывает или закрывает регулирующий орган - клапан 4, установленный на линии подвода жидкости Q 1 в бак.
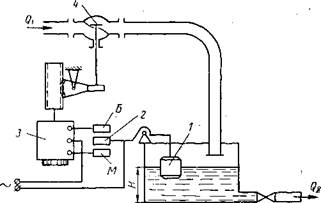 Если расход жидкости Q 2
из бака увеличится, то уровень воды в в нем уменьшится и поплавок 1
опустится. При этом подвижный контакт 2
коснется верхнего неподвижного контакта Б,
электрическая цепь замкнется, двигатель включится и будет вращаться в направлении открытия регулирующего клапана 4,
тем самым увеличивая приток воды в бак. Работа регулятора будет продолжаться до тех пор, пока в баке не восстановится заданный уровень жидкости я
подвижный контакт 2
не установится между неподвижными контактами Б
и М, в результате чего цепь двигателя будет отключена.
Если расход жидкости Q 2
из бака увеличится, то уровень воды в в нем уменьшится и поплавок 1
опустится. При этом подвижный контакт 2
коснется верхнего неподвижного контакта Б,
электрическая цепь замкнется, двигатель включится и будет вращаться в направлении открытия регулирующего клапана 4,
тем самым увеличивая приток воды в бак. Работа регулятора будет продолжаться до тех пор, пока в баке не восстановится заданный уровень жидкости я
подвижный контакт 2
не установится между неподвижными контактами Б
и М, в результате чего цепь двигателя будет отключена.
Автоматический регулятор –это средство автоматизации, получающее, усиливающее и преобразующее сигнал отклонения регулируемой величины и целенаправленно воздействующее на объект регулирования; он обеспечивает поддержание заданного значения регулируемой величины или изменение ее значения по заданному закону.
Автоматические регуляторы классифицируются в зависимости от назначения, принципа действия, конструктивных особенностей, вида используемой энергии и др.
По конструктивным признакам автоматические регуляторы подразделяются на аппаратные, приборные, агрегатные и модульные (элементные).
Регуляторы аппаратного типа конструктивно представляют собой техническое устройство, работающее в комплекте с первичным измерительным преобразователем. Аппаратные автоматические регуляторы работают независимо(параллельно) от средств измерения данного технологического параметра.
Регуляторы приборного типа работают только в комплекте с вторичным измерительным прибором. Приборные регуляторы не имеют непосредственной связи с первичным измерительным преобразователем.
Сигнал об отклонении регулируемой величины от заданного значения(t) поступает на вход приборного регулятора от вторичного измерительного прибора. Для этого измерительный прибор имеет задающее устройство, на котором вручную устанавливается требуемое заданное значение регулируемой величины. Заданное значениеg(t) в приборе сравнивается с действительным значениемx(t) регулируемой величины, определяемым положением подвижной измерительной системы прибора, и разность(t)=g(t)-x(t) подается на вход регулятора.
Рис.1 Структурная схема регулятора.
1–задающее устройство;
2–сравнивающее устройство;
3–усилительно-преобразовательное устройство;
4–исполнительное устройство;
5–объект регулирования;
6–измерительное устройство (служит для определения действительного значения регули- руемого параметра g(t) с учетом действующих на объект регулирования возмущенийf(t)).
Таким образом, регуляторы приборного типа включаются последовательно с вторичным измерительным прибором.
Достоинством регуляторов приборного типа является то, что в этом случае не требуется установка дополнительных первичных измерительных преобразователей и прокладка линий связи от них до регуляторов; их недостаток–более низкие динамические свойства и надежность по сравнению с аналогичными параметрами регуляторов аппаратного типа.
Автоматические регуляторы, построенные по модульному (элементному) принципу , состоят из отдельных модулей (элементов), выполняющих отдельные операции. Входные и выходные сигналы модулей унифицированы. Это позволяет собирать автоматические регуляторы различного функционального назначения.
Автоматические регуляторы, построенные по агрегатному (блочному) принципу, состоят из отдельных унифицированных блоков, выполняющих определенные функции. Входные и выходные сигналы этих блоков унифицированы. Это позволяет из блоков проектировать автоматические регуляторы различного функционального назначения.
В зависимости от источника используемой энергии автоматические регуляторы подразделяются на регуляторы прямого и непрямого действия.
В регуляторах прямого действия одновременно с измерением регулируемой величины от объекта регулирования отбирается часть энергии, которая используется для работы регулятора и воздействия на его исполнительный механизм–регулирующий орган объекта регулирования. Таким образом, к автоматической системе «объект-регулятор» энергия извне не подводится.
В автоматических регуляторах непрямого действия для работы регулятора и воздействия на его исполнительный механизм подводится энергия извне.
В зависимости от вида используемой энергии регуляторы непрямого действия подразделяются на
электрические (электромеханические, электронные),
пневматические,
гидравлические
комбинированные (электропневматические, электрогидравлические).
Электрические автоматические регуляторы применяются главным образом для регулирования на невзрывоопасных объектах при больших расстояниях от пункта управления до объекта регулирования.
Пневматически е автоматические регуляторы применяются во взрыво- и пожароопасных зонах при небольших расстояниях (до 400м) от пункта управления до объекта регулирования.
Гидравлические регуляторы применяются во взрыво- и пожароопасных зонах, как правило, при непосредственном размещении элементов регулятора в зоне объекта регулирования.
Комбинированные регуляторы применяются в случаях, когда необходимо использовать отдельные преимущества электро-, пневмо- или гидрорегуляторов.
По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на регуляторы с линейным инелинейным законами регулирования.
По виду регулируемого параметра автоматические регуляторы подразделяются на регуляторы температуры, давления, разрежения, расхода, уровня, состава и содержания вещества и т.п.