For most environmentally friendly vehicles, such as commercial electric vehicles, hybrids and fuel cell vehicles, the main driving force is the electric motor. The basis of the modern electric motor is the principle of electromagnetic induction - a phenomenon associated with the emergence of an electromotive force in a closed loop when the magnetic flux changes. The close relationship between magnetic and electrical phenomena has opened up new opportunities for scientists. The history of electric transport and of all electrical engineering as a whole begins with the law of electromagnetic induction discovered by M. Faraday in 1831, and E. Lenz's rule, according to which the induction current is always directed in such a way as to counter the cause that causes it. The works of Faraday and Lents formed the basis for the creation of the first electric motor of Boris Yakobi. Modern electric motors, although based on the same law as the electromechanical converter Jacobi, but significantly different from it. Over time, electric motors have become more powerful, more compact, and in addition, their efficiency has increased significantly. The efficiency of a modern traction electric motor can be 85-95%. For comparison, the maximum efficiency of an internal combustion engine without auxiliary systems hardly achieves up to 45%.
Ultimately, the use of a more efficient engine reflects a reduction in energy consumption, less maintenance, less downtime and less risk. Given this reality, the fact is that old and poorly maintained engines lose energy and, therefore, have a lack of income - among other factors. The efficiency of replacing old engines in industrial parks proves in practice that energy savings can be achieved in the range of 5% to 8%.
None of the various engines, the only principle of which is the attraction of iron by a magnet, natural or artificial, has yielded useful results. These are simple toys that can animate certain children's mechanisms or appear in physics classrooms, but are incapable of developing a force suitable for use in practice. It is unlikely, if they provide the strength of the sixth horsepower. Therefore, we can not consider them as real engines.

Types of modern electric motors Electric motors differ in the nature of the supply voltage: AC motor DC motor according to the number of phases of the supply network: Single-phase electric motor. With one working winding, it is connected to a single-phase alternating current network; Two-phase electric motor. It has two windings, shifted in space by 90 degrees; Three-phase electric motor. It is connected to a three-phase alternating current network, has 3 windings, the magnetic fields of which are located 120 degrees. for constructive execution: Collector. The current switch in the windings and the rotor position sensor is the same device - the brush collector unit. It operates mainly on direct current, however modern electric motors, so-called universal collector motors, can simultaneously operate on direct and alternating current; Brushless. The DC-type DC motors are made in the form of a closed system with a rotor position sensor, an inverter and a coordinate converter. according to the principle of operation: Synchronous motor. Electromechanical machine in which the rotor rotates synchronously with the magnetic field of alternating current; Asynchronous electric motor. The rotor frequency of an induction AC motor does not coincide with the frequency of the magnetic field generated by the current of the stator winding. and by the excitation method: with excitation from permanent magnets; with parallel excitation; with sequential excitation; with a series-parallel. Traction motor for electric vehicle
The attractive force of a magnet is very limited, because it decreases, as a square of the distance; This greatly limits the range of motion and makes transmissions virtually impossible. Add that induction currents occur at the time of the formation of the main current and react in the opposite direction of this current. In addition, magnets are large, and we can only use a small part. Finally, the switch to be used is rapidly oxidized, as well as the conductor by electric sparks, the production of which can not be prevented.

The electric motor for a modern electric vehicle can be either DC or AC. Its main task is to transfer the torque to the electric vehicle propulsion unit. The main differences between the modern traction electric motor and the traditional electromechanical machine are the large power and compact dimensions caused by the limited space used. As characteristics of the traction electric motor, in addition to power and maximum torque, voltage, current, and also the speed of rotation are taken into account. Motor-wheel In recent years, as an engine for an electric car, engineers have been using the motor-wheel system, although, increasingly, on concept cars. The exception was Volage - a sports electric car built by the forces of Venturi and Michelin, which will soon go on sale. Active Wheel technology has a number of advantages. All active safety systems such as ABS, ESP, Brake Assist and Traction Control can be flashed into the control software, after which they can act on each wheel separately. Add to this the mobility of the system and the ability to regenerate the energy of inhibition.
Restricted by a natural magnet or electromagnet, the electric motor was thus in a real dead end, and serious inventors ceased to worry about this when a real revolution took place on this issue. Thus, a magneto-or dynamo-electric machine can produce electricity when an offset is printed relative to the inductor and the armature; but, conversely, if you send an electric current of sufficient force to the same machine, it will start moving. This means that if a dynamo-electric machine prints traffic, we have electricity; If, on the contrary, electricity is supplied to it, motion occurs.

Of course, there are drawbacks. Try to shove a bunch of gears inside a small rim. If it does, the weight of the wheel will increase, and this will have a bad effect on handling, increase the wear of the suspension, the transmission of vibration to the body will increase. The ideal weight of the car wheel should be 10-30 kg. Michelin engineers managed to fit into this framework - the traction electric motor Active Wheel weighs only 7 kg, and the rest of the system's mechanics is stacked in 11 kg. Advantages and disadvantages of the electric motor Advantages over the ICE of the electric motor are many: Low weight and quite compact dimensions. For example, engineers Yasa Motors have developed a motor weighing 25 kg, which can produce up to 650 Nm. Durability, simple operation. Ecological compatibility. The maximum torque is available from 0 rpm. High efficiency. There is no need for a gearbox. Although, according to experts, an electric car it does not hurt. Possibility of recuperation. There are no essential shortcomings in the electric motor itself. But there are great difficulties in its nutrition. The imperfection of current sources does not yet provide a mass use of electric motors in the automotive industry.
It follows that if we take two similar dynamo-electric machines, we will place them at some distance from each other and attach them to the flow when we turn first, generate electricity and send the electricity thus produced to the second, using a conductive wire , the latter will be set in motion and can perform mechanical work.
In this fact, i.e. in the union, in conjugation, there were two dynamo-electric machines, the principle of an entire revolution for the electric motor. Initially, it was believed that just as enough to throw coal into the source of the steam boiler, produce power in the steam engine, so it is enough to burn zinc in the voltaic pile, to produce electricity. The principle was true; only there is no limit to the production of power through steam, while incommensurable amounts of zinc must be burned in the heap of Volta, to give the electric current the energy proportional to the work. that industry claims.
The electric machine consists of a stationary part - a stator (for asynchronous and synchronous alternating current machines) or an inductor (for DC machines) and a moving part - a rotor (for asynchronous and synchronous alternating current machines) or an armature (for DC machines). In the role of an inductor on low-power DC motors, permanent magnets are often used.
The principle of using two dynamo-electric machines, or, as we say today, reversible, has provided a solution to the problem of the electric motor completely unexpected and at the same time definite. For while one quickly stops in the production of mechanical force, with a bunch of Volts, you can create the same driving force that you want, by increasing the amount of horsepower that a steam engine can give.
And this principle not only provided a solution to the problem of the electric motor, but also provided science and industry with a completely new principle - the transfer of power at a distance. In fact, since two reversible dynamo-electric machines can be placed at any distance from each other, by using a conductive wire that unites them, you can move a certain amount of the original force. And this primitive force, we note, in addition, can be an artificial force, such as steam or natural force, like a waterfall or wind.
The rotor can be:
- short circuited;
- phase (with winding) - are used where it is necessary to reduce the starting current and to regulate the frequency of rotation of the induction motor. Now these engines are rare, as frequency converters have appeared on the market, before they were very often used in crane installations.
Anchor is a moving part of DC machines (engine or generator) or working on the same principle of the so-called universal engine (which is used in electric tools). In fact, the universal motor is the same DC motor with sequential excitation (armature winding and inductor are connected in series). The difference is only in the calculation of the windings. At the direct current there is no reactive (inductive or capacitive) resistance. Therefore, any Bulgarian, if the electronic unit is to be thrown out, will be fully operational and at a constant current, but with a lower voltage of the network.
Each dynamo-electric machine by virtue of the principle of reversibility can function as an electricity generator or as a receiver of an electric current, that is, act as an electric motor; but today the name of the electric motor is reserved for small devices specially designed to convert electrical energy into mechanical energy and able to supply small amounts of work applicable to special machines. such as a sewing machine, mechanical lathes, fans, drilling machines, rolling mills, etc.
Principle of operation of three-phase asynchronous electric motor
When plugged into the network, a circular rotating magnetic field arises in the stator, which pierces the short-circuited winding of the rotor and induces an induction current therein. Hence, following the law of Ampere (the conductor with current, placed in a magnetic field, the emf acts), the rotor comes into rotation. The rotor speed depends on the frequency of the supply voltage and on the number of pairs of magnetic poles. The difference between the rotational frequency of the stator magnetic field and the rotor speed is characterized by slip. The motor is called asynchronous, since the rotational speed of the stator magnetic field does not coincide with the rotor speed. The synchronous motor has a difference in the design of the rotor. The rotor is performed either by a permanent magnet, or by an electromagnet, or has a part of a squirrel cage (for start-up) and permanent or electromagnets. In the synchronous motor, the rotational frequency of the stator magnetic field and the rotor speed are the same. To start, use auxiliary induction motors, or a rotor with a short-circuited winding.
The machine for receiving grams can serve as an electric motor, but, we repeat, the name is now reserved for machines with much less force and which are created for weak mechanical work. In the first chapter, we will consider the main electric motors known today, referring to the next chapter on the study of the great question of the transfer of force at a distance by dynamo-electric machines.
One of the first dynamo-electric machines, built by Mr. Gramme, is a special shape receiver that can function as a small electric motor. It is equipped with four brooms and four poles surrounding the ring, as in the octagonal gram dynamo, described in addition to electromagnetism. But its use, from this point of view, has not received an extension.
Asynchronous motors have found wide application in all branches of engineering. This is especially true for simple and robust three-phase asynchronous motors with short-circuited rotors, which are safer and cheaper than all electric motors and require virtually no maintenance. The name "asynchronous" is due to the fact that in such an engine the rotor rotates not synchronously with the rotating field of the stator. Where there is no three-phase network, the induction motor can be connected to a single-phase current network.
Marcel Despres introduced the very convenient form of the small engine that we represent here. This defect was corrected by using two reinforcements up to 90 degrees one on the other; so that one was neutral, the other was in full operation. When the machine is put into operation, it turns a tree. The outer curve of this nucleus is no longer an arc of a circle having a center on the axis; it is limited by an eccentric arc, so that when rotating, its surface gradually approaches the surface of the magnetic pole.
Thus, the obtained electric energy can be varied between distant limits without the magnetic intensities of the fixed element, and the mobile element, which ceases to remain in the desired ratio. The armature is placed between the identical poles of the electromagnet and is no longer parallel to its branches.
The stator of an asynchronous electric motor consists, as in a synchronous machine, from a package of 0.5 mm thick varnished sheets of electrical steel, in which the winding is laid. Three phases of the stator winding of an asynchronous three-phase motor, spatially offset by 120 °, are connected to each other by a star or a triangle.
This engine, which we present in Figure 392, is widespread in the United States and Europe. This coil is completely closed in the inductor. Metal cores of electromagnets - malleable iron; which makes the production very economical without affecting the operation of the device, since the coercive force of the cast iron is about the same as that of soft iron. Fig. - Small electric motor M. de Meritens.
According to precise experiments, the electric motor of M. de Meritens, whose weight is only 32 kilograms and a half, produces a force of three quarters of horsepower with a yield of 50%. Fig. - Small electric motor Ayrton and Perry. Figure 394 shows the armature and inductor of this machine. This ring is made of flat discs in a smooth serrated sheet. Brooms rotate with an electromagnet, and the collection is fixed. Fig. - Small electric motor Ayrton and Perry control the fan.
In Fig. shows a schematic diagram of a bipolar machine - four grooves per phase. When the stator windings are powered from a three-phase network, a rotating field is obtained, since the currents in the winding phases that are displaced 120 ° in space relative to each other are 120 ° apart relative to each other.
For the synchronous speed nc of the motor field with pole pairs, it is valid at the current frequency f: nc = f / p
Figure 395 shows the electric motor of Mr. Ayrton and Perry working with the fan. These are the main electric motors, that is small dynamo-electric receiving machines, which can function as driving agents for the production of small forces. However, their use should not be despised, since one of them, like the engine of Ayrton and Perry, gives, as we said, a 50 percent return.
The preliminary question of diluted small electric motors, let us come to the great fact of applying the reversibility of dynamo-electric machines for transportation at all distances of natural or artificial forces. The transfer of force at a distance by reversibility of dynamo-electric machines.
At a frequency of 50 Hz we obtain synchronous field rotation frequencies for p = 1, 2, 3 (two-, four- and six-pole machines) nc = 3000, 1500 and 1000 rpm.
The rotor of an asynchronous electric motor also consists of sheets of electrical steel and can be made in the form of a short-circuited rotor (with a squirrel cage) or a rotor with contact rings (phase rotor).
It has often been asked which physicist attributes the idea of combining two dynamoelectric machines in order to remove force. Today the question is clear. The last at the Vienna exhibition was a dynamo-electric machine, converted by a simple gas engine. Another car, also exhibited by Mr. Fontaine, next to the previous one, worked as an electric motor and was equipped with a Volta battery. Fontaine, noticed him. Since you have the first machine that produces electricity, and the second that consumes electricity, why not transfer electricity directly from the first to the second and do not remove the battery?
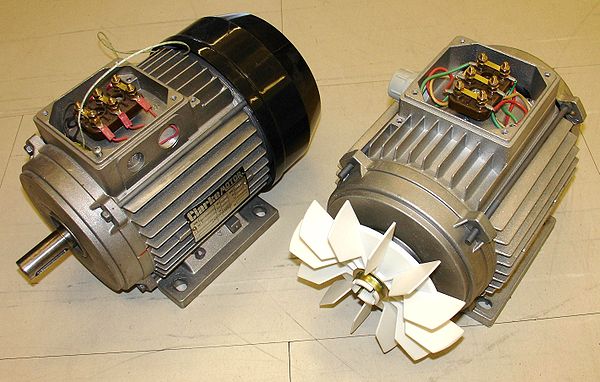
In a short-circuited rotor, the winding consists of metal rods (copper, bronze or aluminum), which are located in the grooves and connected at the ends by short-circuiting rings (Fig. 1). The connection is carried out by soldering or welding. In the case of aluminum or aluminum alloys, the rotor rods and ringing rings, including the fan blades located on them, are manufactured by injection molding.
In this way, you will have a double conversion of motion into electricity and electricity into motion. The operation was neither long nor expensive. After a few seconds, two dynamo-electric machines were connected to each other by an insulated conductive wire, and the first machine that produced electricity caused displacement of the second, located at some distance.
The principle of the transportation of power by electricity is found, its applications did not take long to wait. An assistant engineer with great merit, Mr. Chretien, he plowed, transporting the field to plow the power of the steam engine of his plant. Arbi used force transport to move rotary saws to divide the tree into boards.
At the rotor of the electric motor with contact rings in the grooves there is a three-phase winding, similar to the stator winding, included, for example, by a star; The phases start to be connected to three contact rings fixed to the shaft. When starting the engine and for adjusting the speed, it is possible to connect the rheostats (via contact rings and brushes) to the phases of the rotor winding. After a successful run, the contact rings are short-circuited, so that the winding of the motor rotor performs the same functions as in the case of a short-circuited rotor.
Dumont, an engineer, maneuvered the water pumps at a distance, using a stationary steam engine and an electric current flowing to the pumps. In the shops of the Louvre, the thread passing along the street of Saint Honore sends a force borrowed from the engine, placed in the cellars, to the street de Valois, 150 meters from it.
In the mines, some devices are controlled by a thread that carries the power of a steam engine located near producing wells. In St. Moritz, in the canton of Graubünden, there is a hotbed of electric light, fed by the fall of the torrent. Today, at all industrial exhibitions containing computer galleries, most machines operate without a visible motor, because power is sent to them, remotely, by a steam engine installed outside.
A source
The device of the asynchronous motor http://techno.x51.ru/index.php?mod=text&uitxt=905
Classification of electric motors
By type of excitation, the collector motors can be divided into:
- motors with independent excitation from electromagnets and permanent magnets;
- motors with self-excitation.
Motors with self-excitation are divided into:
- Motors with parallel excitation (armature winding is connected in parallel to the field winding)
- Engines of series excitation (armature winding is connected in series to the excitation winding)
- Motors of mixed excitation (the excitation winding is switched partly in series in part parallel to the armature winding)
AC Motors
Three-phase asynchronous motors
There are synchronous motors with discrete angular displacement of the rotor - stepping motors. At them the set position of the rotor is fixed by supplying power to the corresponding windings. The transition to another position is carried out by removing the supply voltage from one winding and transferring it to the other. Another type of synchronous motors is a valve reactive electric motor, the power supply of which is formed by means of semiconductor elements.
Asynchronous motor - an alternating current motor in which the rotational speed of the rotor is different from the frequency of the rotating magnetic field produced by the supply voltage. These engines are the most common nowadays.
The number of phases of AC motors are divided into:
- single-phase - start manually, or have a starting winding, or have a phase-shifting circuit;
- multiphase;
Universal collector motor
Universal collector motor - collector motor, which can work on both direct current and alternating current. It is made only with a serial excitation winding at a power of up to 200 W. The stator is made of a special electrotechnical steel. The excitation winding is switched in partially at an alternating current and completely at constant. For alternating current, the rated voltage is 127,220., For a constant voltage of 110.220. Applicable in household appliances, power tools. AC motors powered by an industrial network of 50 Hz do not allow a speed above 3000 rpm. Therefore, to obtain high frequencies, a collector motor is used, which, moreover, is obtained more easily and less than an AC motor of the same power, or special transmission mechanisms are used that change the kinematic parameters of the mechanism to the required (multipliers). When using frequency converters or the presence of a high frequency network (100, 200, 400 Hz), AC motors are lighter and smaller than collector motors (the collector node sometimes occupies half the space). The resource of AC induction motors is much higher than that of collector motors, and is determined by the condition of the bearings and the insulation of the windings.
A synchronous motor with a rotor position sensor and an inverter is an electronic analog of a DC collector motor.
History
The principle of converting electrical energy into mechanical energy by an electromagnetic field was demonstrated by the British scientist Michael Faraday in 1821 and consisted of a freely hanging wire dipping into the mercury pool. A permanent magnet was installed in the middle of the mercury pool. When current was passed through the wire, the wire rotated around the magnet, indicating that the current caused a cyclic magnetic field around the wire. This engine is often demonstrated in school physics classes, instead of toxic mercury use brine. This is the simplest kind from the class of electric motors. The next improvement is Wheel Barlow. It was a demonstration device, unsuitable in practical applications due to limited power. The inventors sought to create an electric motor for production needs. They tried to force the iron core to move back and forth in the electromagnet field, that is, as the piston moves in the cylinder of the steam engine. Russian scientist B. S. Jacobi went the other way. In 1834 he created the world's first practically usable electric motor with a rotating armature and published a theoretical paper "On the application of electromagnetism for driving a machine". B. Jacobi wrote that his engine is simple and "gives a direct circular movement, which is much easier to transform into other types of motion than reciprocating."
The armature motion of the armature in the Jacobi engine was due to the alternate attraction and repulsion of the electromagnets. A stationary group of U-shaped electromagnets was supplied with a current directly from the galvanic battery, and the direction of the current in these electromagnets remained unchanged. The mobile group of electromagnets was connected to the battery via a switch, by means of which the direction of the current in each electromagnet changed once per revolution of the disk. The polarity of the electromagnets changed accordingly, and each of the alternating electromagnets was attracted and repelled by the corresponding stationary electromagnet: the motor shaft started to rotate. The power of this engine was only 15 watts. Subsequently, Jacobi brought the power of the electric motor to 550 watts. This engine was installed first on a boat, and later on a railway platform.
September 13, 1838 boat with 12 passengers swam across the Neva River against the current at a speed of about 3 km / h. The boat was equipped with wheels with blades. The wheels were driven into rotation by an electric motor, which received a current from a battery of 320 electrochemical cells. So for the first time an electric motor appeared on the ship.
Notes
Literature
- Belov MP, Novikov VA, Rassudov L.N. Automated electric drive of standard production mechanisms and technological complexes. - 3rd ed., Rev. - M.: Publishing Center "Academy", 2007. - 575 p. - (Higher vocational education). - 1000 copies. - ISBN 978-5-7695-4497-2
References
|